面向电弧增材的单线激光扫描路径规划
Single-line laser scanning path planning for wire arc and additive manufacturing
面向电弧增材的单线激光扫描路径规划 |
| 靳佳澳,沈洪垚,孙扬帆,林嘉浩,陈静霓 |
|
Single-line laser scanning path planning for wire arc and additive manufacturing |
| Jia-ao JIN,Hong-yao SHEN,Yang-fan SUN,Jia-hao LIN,Jing-ni CHEN |
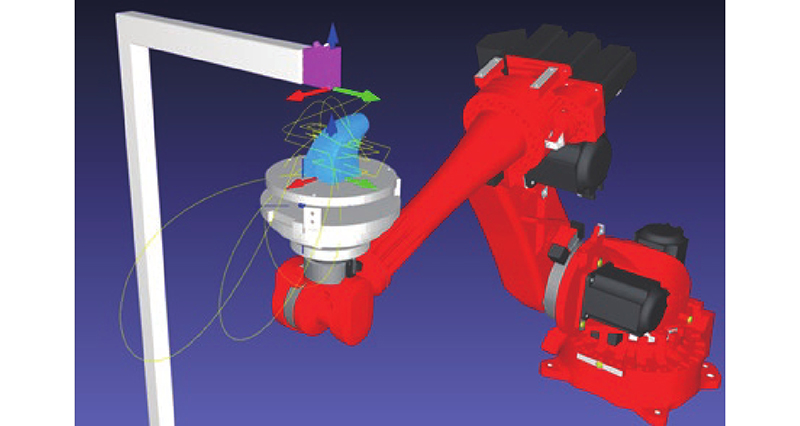
| 图 19 机器人末端的仿真运动路径 |
| Fig.19 Simulation motion path of end of robot |
|
|