基于时间冲击最优的TBM换刀机器人轨迹规划
Trajectory planning of TBM disc cutter changing robot based on time-jerk optimization
基于时间冲击最优的TBM换刀机器人轨迹规划 |
| 陶治同,陶建峰,覃程锦,刘成良 |
|
Trajectory planning of TBM disc cutter changing robot based on time-jerk optimization |
| Zhi-tong TAO,Jian-feng TAO,Cheng-jin QIN,Cheng-liang LIU |
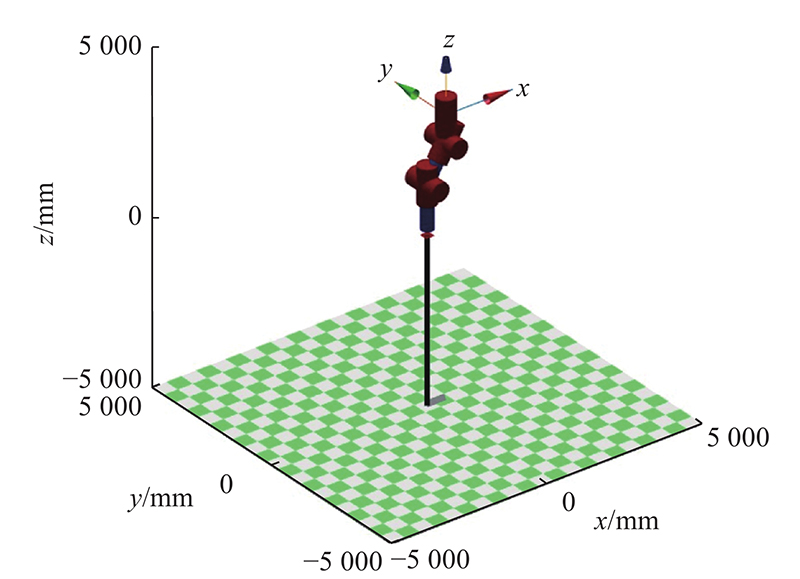
| 图 3 换刀机器人运动学模型 |
| Fig.3 Kinematic model of disc cutter changing robot |
|
|