基于最小流量的液压机械臂冗余分解
Redundancy resolution of hydraulic manipulators based on minimum-flow
基于最小流量的液压机械臂冗余分解 |
| 丁孺琦,李望笃,李刚,胡国良 |
|
Redundancy resolution of hydraulic manipulators based on minimum-flow |
| Ru-qi DING,Wang-du LI,Gang LI,Guo-liang HU |
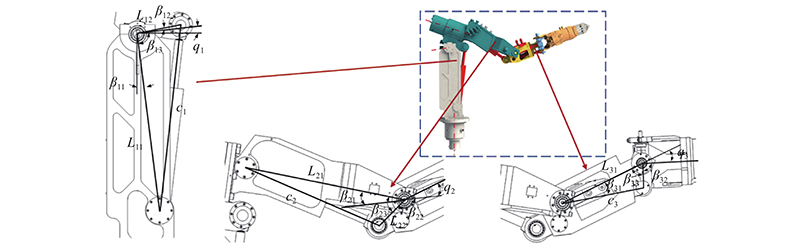
| 图 4 液压机械臂各关节几何关系 |
| Fig.4 Geometric relationship of each joint on hydraulic manipulator |
|
|