基于自抗干扰的装配机器人阻抗控制技术
Impedance control technology of assembly robot based on active disturbance rejection
基于自抗干扰的装配机器人阻抗控制技术 |
| 张世玉,陈东生,宋颖慧 |
|
Impedance control technology of assembly robot based on active disturbance rejection |
| Shi-yu ZHANG,Dong-sheng CHEN,Ying-hui SONG |
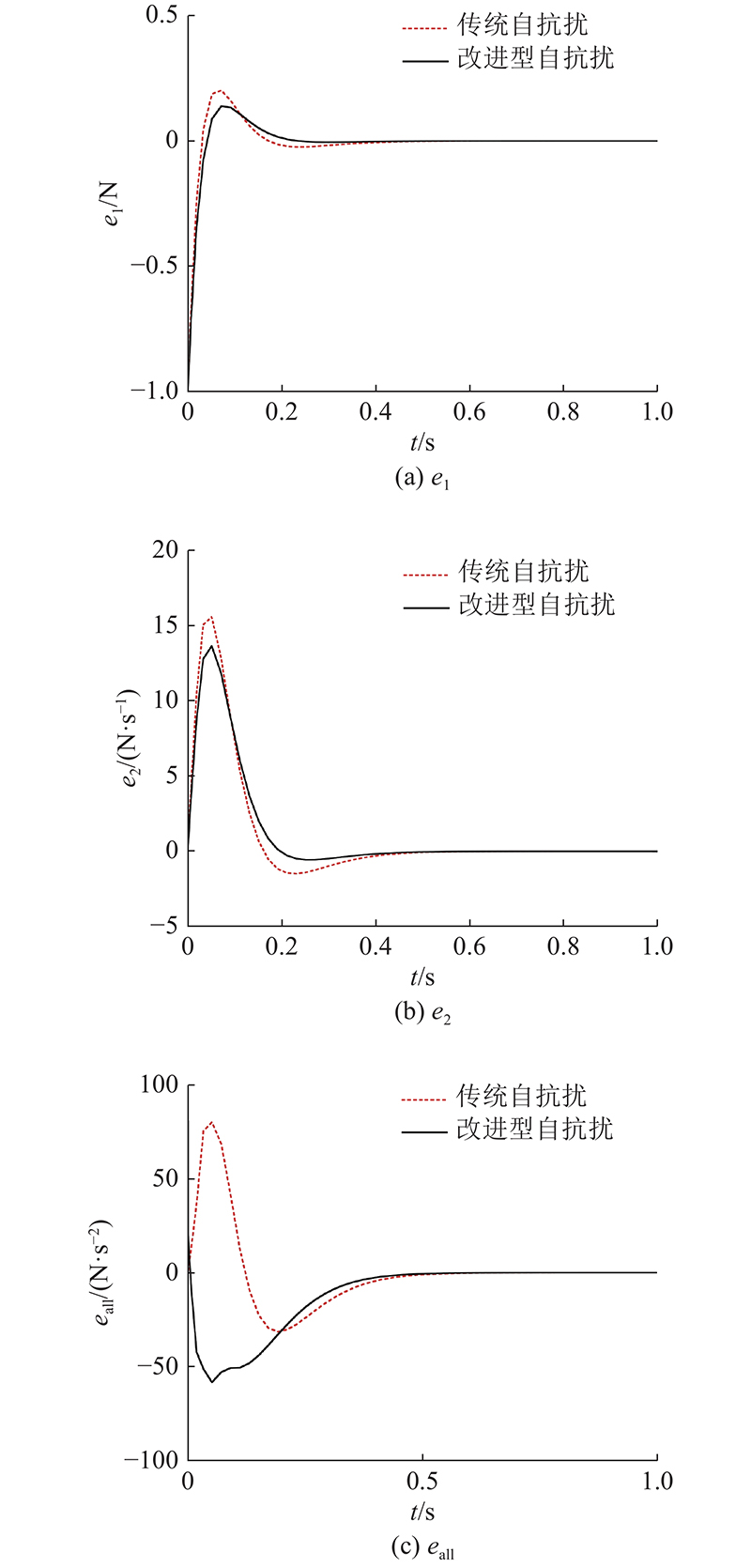
| 图 4 2种自抗扰控制下扩张状态观测器的状态观测误差 |
| Fig.4 State observation error of extended state observer under two kinds of active disturbance rejection control |
|
|