基于自适应神经网络滑模观测器的容错控制
Fault-tolerant control based on adaptive neural network sliding mode observer
基于自适应神经网络滑模观测器的容错控制 |
| 杨正银,胡健,姚建勇,沙英哲,宋秋雨 |
|
Fault-tolerant control based on adaptive neural network sliding mode observer |
| Zheng-yin YANG,Jian HU,Jian-yong YAO,Ying-zhe SHA,Qiu-yu SONG |
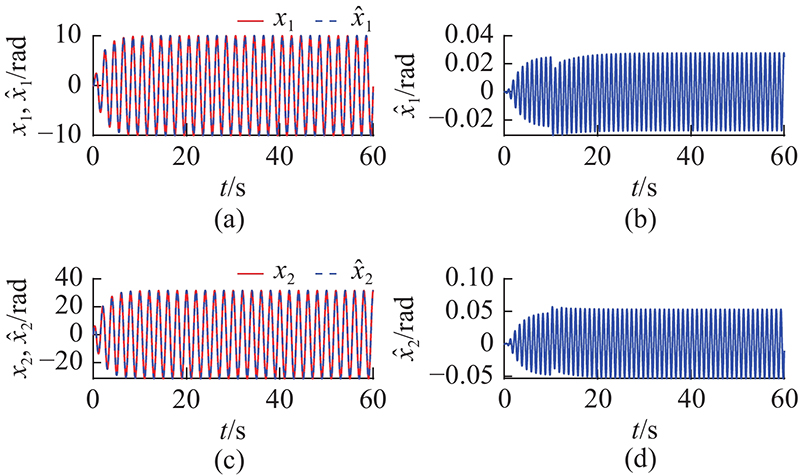
| 图 7 系统位置、速度观测误差 |
| Fig.7 Errors in system position and velocity observations |
|
|