基于Bouc-Wen修正模型的柔性关节驱动器迟滞建模
Modified Bouc-Wen based hysteresis modeling of flexible joint actuator
基于Bouc-Wen修正模型的柔性关节驱动器迟滞建模 |
| 许明,张帝,戎铖,苏礼荣,王万强 |
|
Modified Bouc-Wen based hysteresis modeling of flexible joint actuator |
| Ming XU,Di ZHANG,Cheng RONG,Li-rong SU,Wan-qiang WANG |
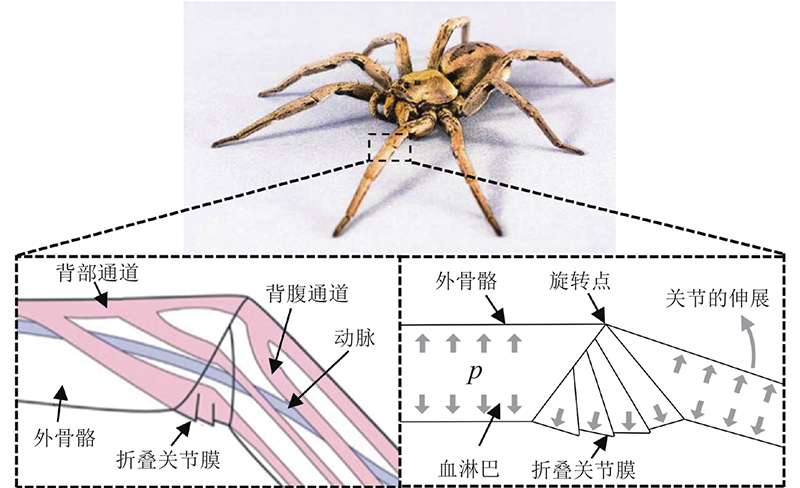
| 图 1 仿蜘蛛腿的柔性关节驱动器原理[ |
| Fig.1 Principle of flexible joint actuator inspired by spider legs[ |
|
|