基于模糊补偿的连续型空间机械臂预定时间控制
Predefined-time control of continuum space manipulator based on fuzzy compensation
基于模糊补偿的连续型空间机械臂预定时间控制 |
| 丁萌,顾秀涛,郑先杰,郭毓 |
|
Predefined-time control of continuum space manipulator based on fuzzy compensation |
| Meng DING,Xiu-tao GU,Xian-jie ZHENG,Yu GUO |
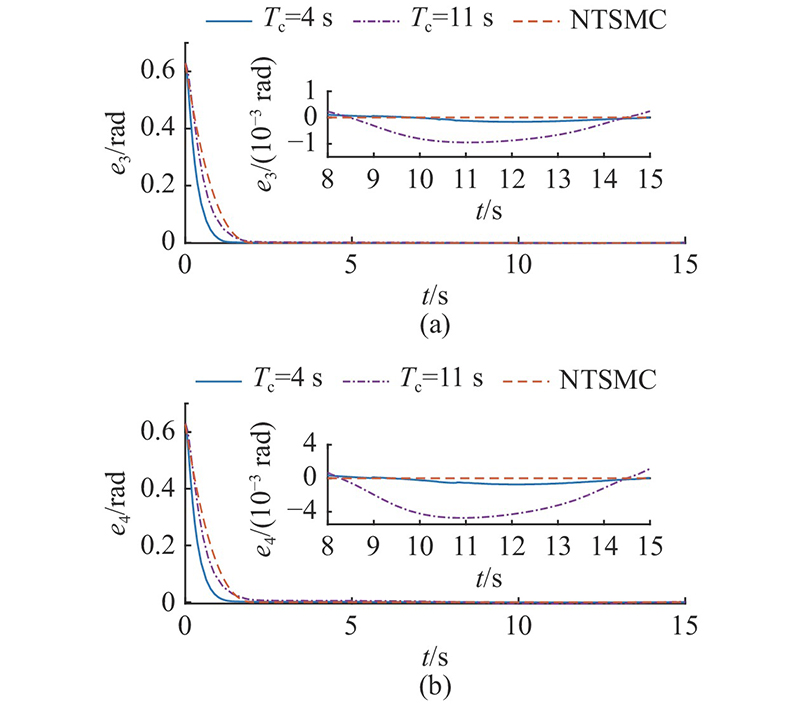
| 图 6 不同控制策略下的第2节机械臂姿态误差曲线 |
| Fig.6 Attitude error curves of section 2 manipulator under different control strategies |
|
|