双臂空间机器人的固定时间轨迹跟踪控制
Fixed time trajectory tracking control for dual-arm space robot
双臂空间机器人的固定时间轨迹跟踪控制 |
| 洪梦情,丁萌,顾秀涛,郭毓 |
|
Fixed time trajectory tracking control for dual-arm space robot |
| Meng-qing HONG,Meng DING,Xiu-tao GU,Yu GUO |
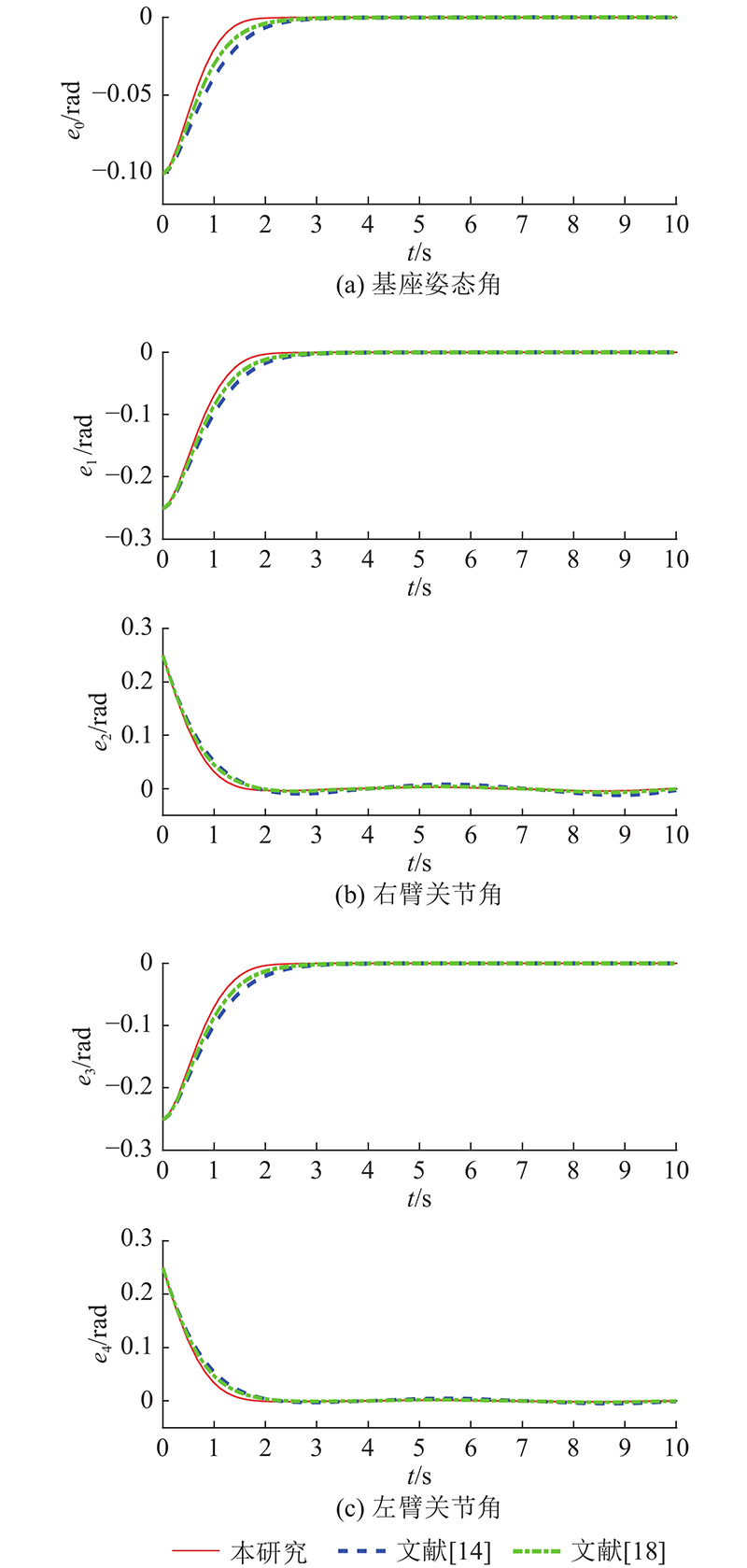
| 图 5 不同固定时间控制律下跟踪误差收敛时间对比 |
| Fig.5 Convergence time under different fixed-time controllers |
|
|