基于自适应随动机构的机器人目标跟随
Robot target following based on adaptive follower mechanism
基于自适应随动机构的机器人目标跟随 |
| 陈宏鑫,张北,王春香,杨明 |
|
Robot target following based on adaptive follower mechanism |
| Hong-xin CHEN,Bei ZHANG,Chun-xiang WANG,Ming YANG |
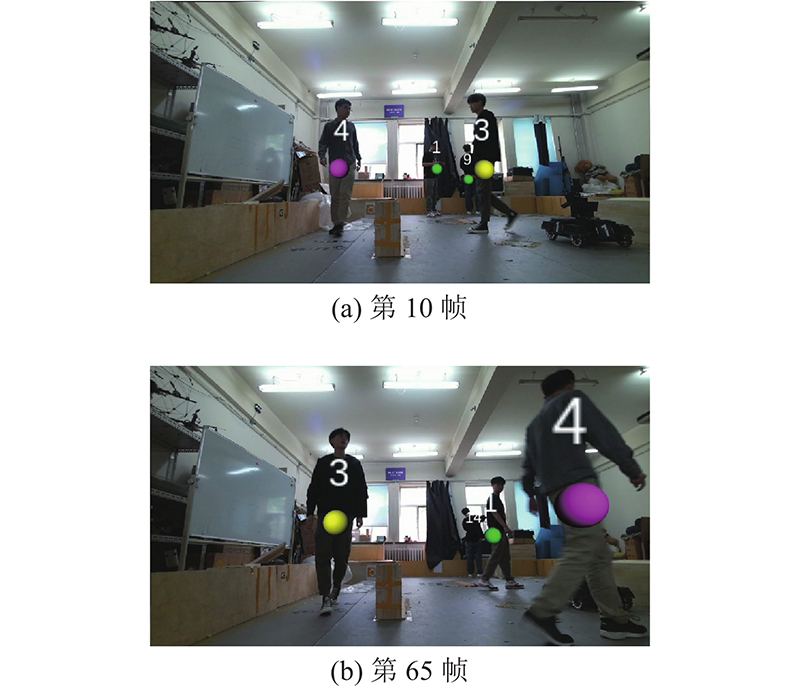
| 图 8 使用Azure Kinect数据的多目标匹配与跟踪结果 |
| Fig.8 Multi-target matching and tracking results using Azure Kinect data |
|
|