基于自适应随动机构的机器人目标跟随
Robot target following based on adaptive follower mechanism
基于自适应随动机构的机器人目标跟随 |
| 陈宏鑫,张北,王春香,杨明 |
|
Robot target following based on adaptive follower mechanism |
| Hong-xin CHEN,Bei ZHANG,Chun-xiang WANG,Ming YANG |
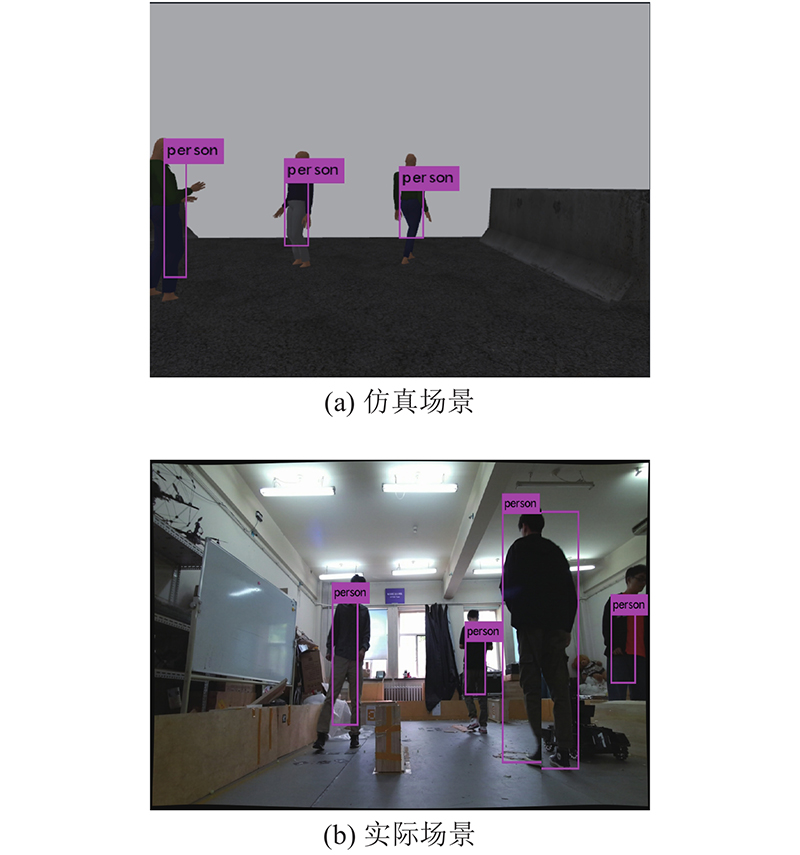
| 图 6 YOLOv3算法在仿真与实际场景中的行人检测结果 |
| Fig.6 Pedestrian detection results of YOLOv3 algorithm in simulation and real scenes |
|
|