基于重投影深度差累积图与静态概率的动态RGB-D SLAM算法
Dynamic RGB-D SLAM algorithm based on reprojection depth difference cumulative map and static probability
基于重投影深度差累积图与静态概率的动态RGB-D SLAM算法 |
| 林凯,梁新武,蔡纪源 |
|
Dynamic RGB-D SLAM algorithm based on reprojection depth difference cumulative map and static probability |
| Kai LIN,Xin-wu LIANG,Ji-yuan CAI |
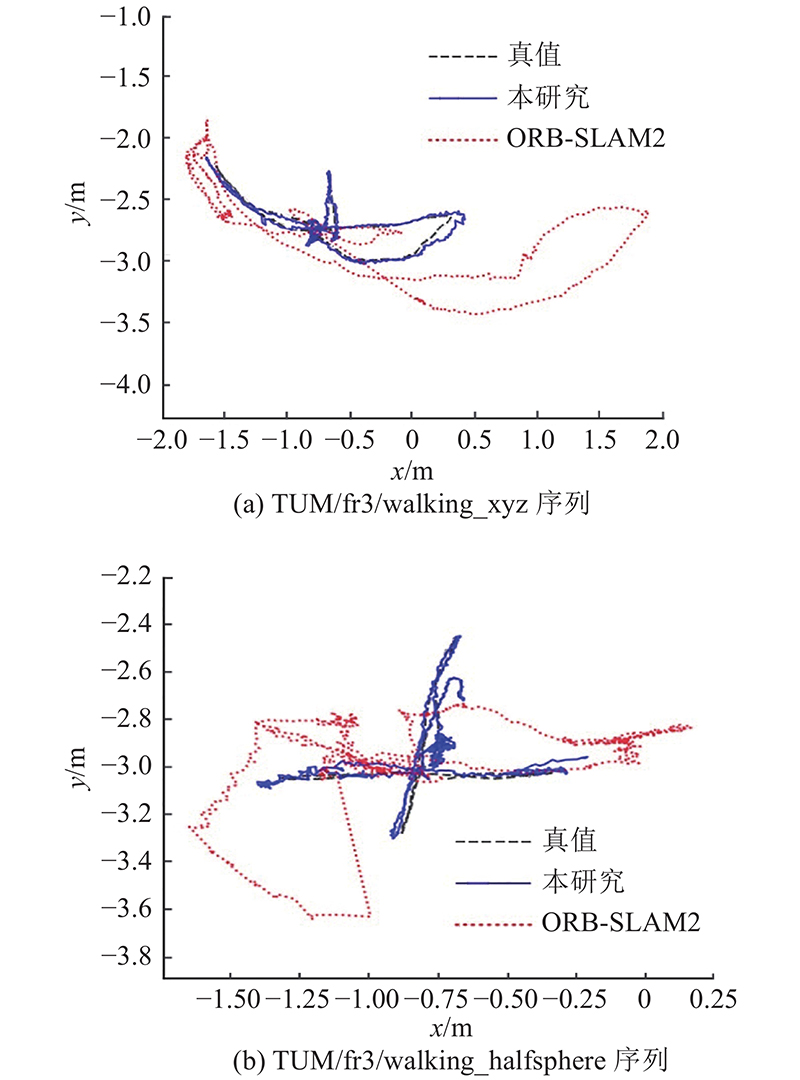
| 图 7 本研究算法与ORB-SLAM2估计轨迹对比图 |
| Fig.7 Comparison of estimated trajectories between proposed method and ORB-SLAM2 |
|
|