重尾非高斯定位噪声下鲁棒协同目标跟踪
Robust cooperative target tracking under heavy-tailed non-Gaussian localization noise
重尾非高斯定位噪声下鲁棒协同目标跟踪 |
| 陈小波,陈玲,梁书荣,胡煜 |
|
Robust cooperative target tracking under heavy-tailed non-Gaussian localization noise |
| Xiao-bo CHEN,Ling CHEN,Shu-rong LIANG,Yu HU |
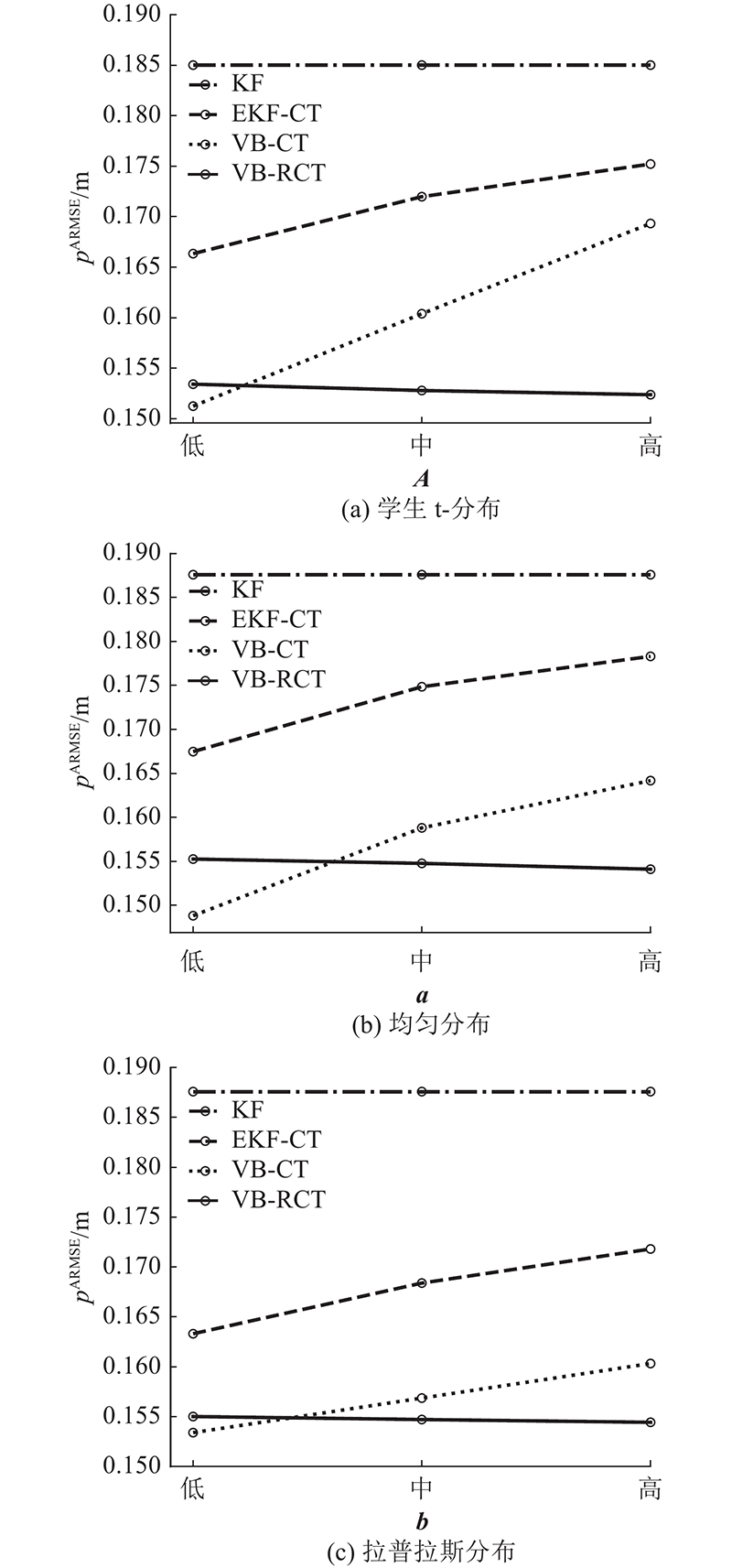
| 图 8 从不同分布采样野值数据时,不同算法的跟踪误差 |
| Fig.8 Tracking errors of different algorithms when sampling outliers from different distributions |
|
|