基于实例分割的复杂环境车道线检测方法
Lane detection method in complex environments based on instance segmentation
基于实例分割的复杂环境车道线检测方法 |
| 杨淑琴,马玉浩,方铭宇,钱伟行,蔡洁萱,刘童 |
|
Lane detection method in complex environments based on instance segmentation |
| Shu-qin YANG,Yu-hao MA,Ming-yu FANG,Wei-xing QIAN,Jie-xuan CAI,Tong LIU |
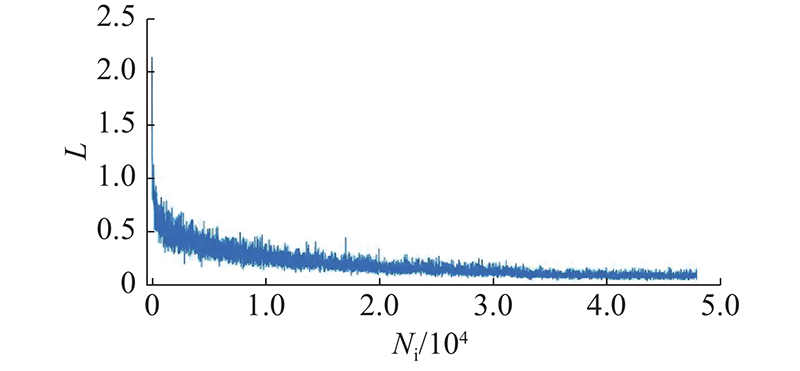
| 图 6 训练过程的损失值变化曲线 |
| Fig.6 Change curve of loss value in training process |
|
|