基于参数优化的机器人花键装配偏角感知识别方法
Deflection angle perception and recognition method of robot spline assembly based on parameter optimization
基于参数优化的机器人花键装配偏角感知识别方法 |
| 支乐威,陈教料,王佳才,胥芳,张立彬 |
|
Deflection angle perception and recognition method of robot spline assembly based on parameter optimization |
| Le-wei ZHI,Jiao-liao CHEN,Jia-cai WANG,Fang XU,Li-bin ZHANG |
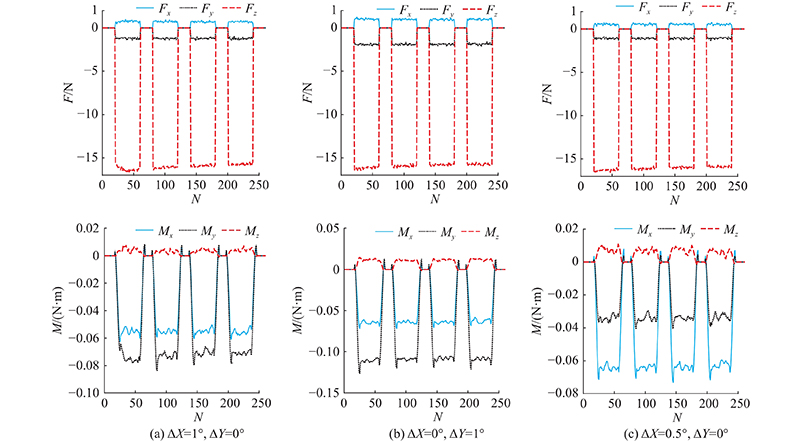
| 图 8 部分装配偏角接触状态对应六维力信号 |
| Fig.8 Part of assembly deflection angle contact state corresponds to six-dimensional force signal |
|
|