基于改进切换增益自适应率的欠驱动USV滑模轨迹跟踪控制
Improved switching-gain adaptation based sliding mode control for trajectory tracking of underactuated unmanned surface vessels
基于改进切换增益自适应率的欠驱动USV滑模轨迹跟踪控制 |
| 于瑞,徐雪峰,周华,杨华勇 |
|
Improved switching-gain adaptation based sliding mode control for trajectory tracking of underactuated unmanned surface vessels |
| Rui YU,Xue-feng XU,Hua ZHOU,Hua-yong YANG |
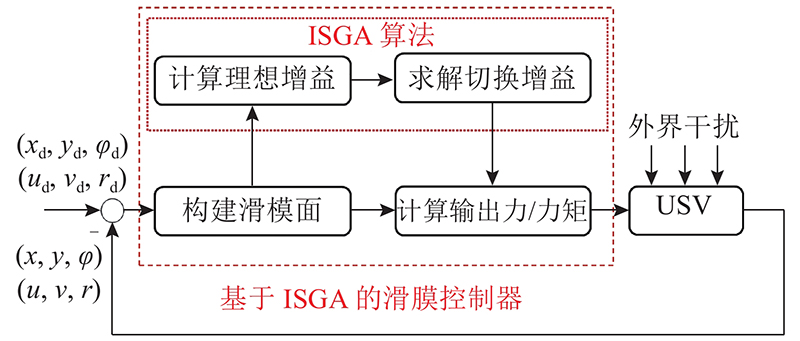
| 图 2 基于改进切换增益自适应率的控制器原理 |
| Fig.2 Control principle based on improved switching-gain adaptation |
|
|