PORP:面向无人驾驶的路径规划并行优化策略
PORP: parallel optimization strategy of route planning for self-driving vehicles
PORP:面向无人驾驶的路径规划并行优化策略 |
| 戴天伦,李博涵,臧亚磊,戴华,于自强,陈钢 |
|
PORP: parallel optimization strategy of route planning for self-driving vehicles |
| Tian-lun DAI,Bo-han LI,Ya-lei ZANG,Hua DAI,Zi-qiang YU,Gang CHEN |
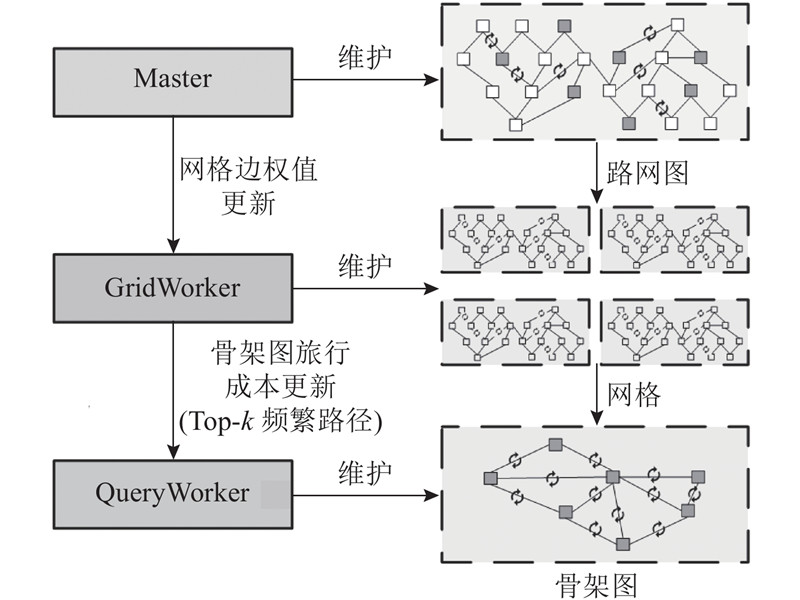
| 图 2 DLG-index分布式部署 |
| Fig.2 Distributed deployment of DLG-index |
|
|