基于多种群竞争松鼠搜索算法的机械臂时间最优轨迹规划
Time-optimal trajectory planning of manipulator based on multi-group competition squirrel search algorithm
基于多种群竞争松鼠搜索算法的机械臂时间最优轨迹规划 |
| 赵业和,刘达新,刘振宇,谭建荣 |
|
Time-optimal trajectory planning of manipulator based on multi-group competition squirrel search algorithm |
| Ye-he ZHAO,Da-xin LIU,Zhen-yu LIU,Jian-rong TAN |
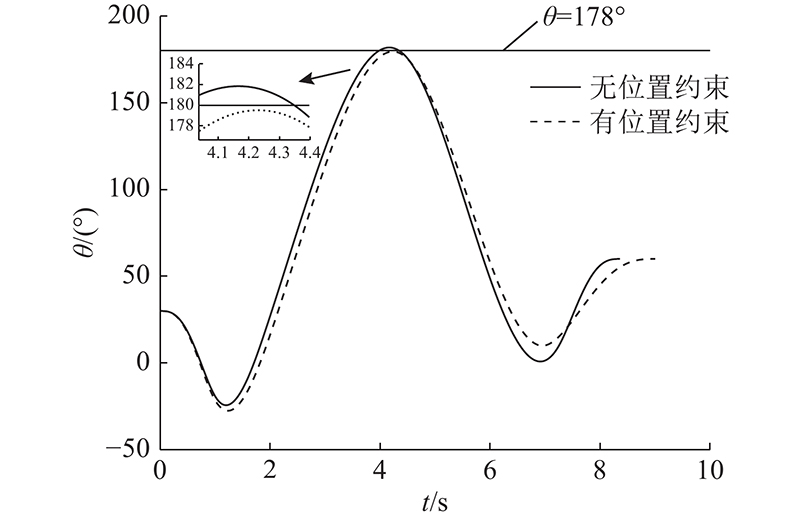
| 图 5 有无位置约束的轨迹优化结果对比 |
| Fig.5 Comparison of trajectory optimization results with and without position constraints |
|
|