管道内壁四足爬壁机器人的运动学与步态规划
Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall
管道内壁四足爬壁机器人的运动学与步态规划 |
| 李琳,薛泽浩,蔡蒂,张铁 |
|
Kinematics and gait planning of wall-climbing quadruped robot for pipeline inner wall |
| Lin LI,Ze-hao XUE,Di CAI,Tie ZHANG |
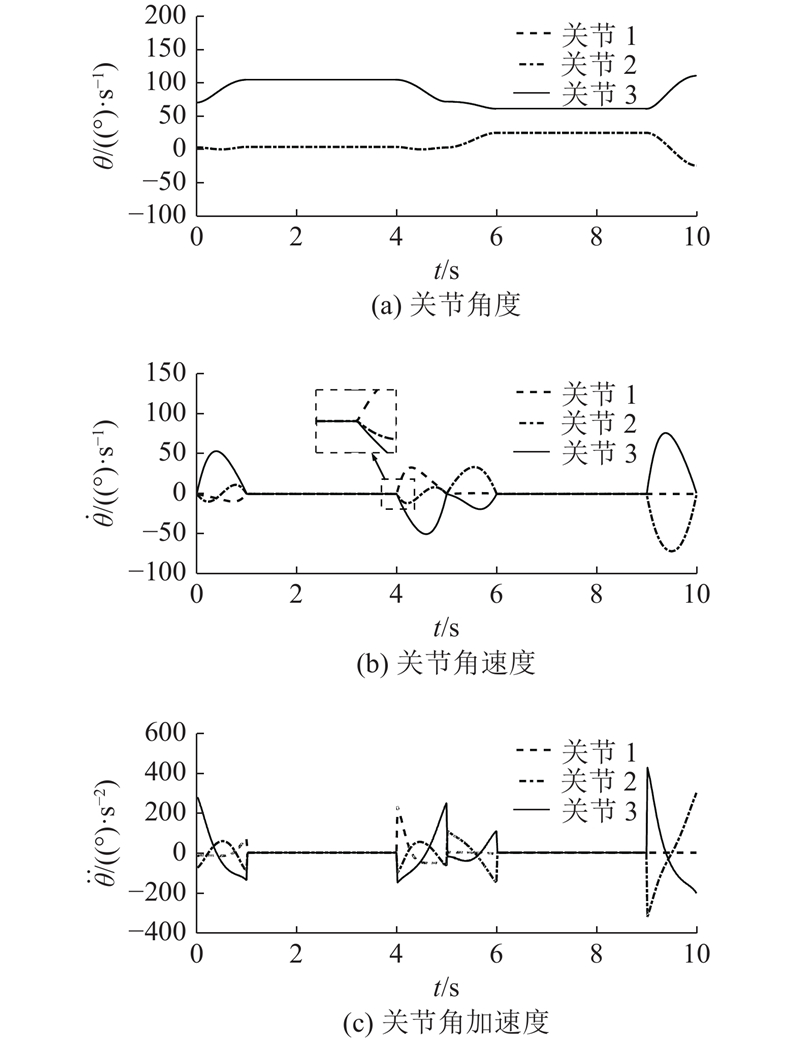
| 图 10 3次样条插值法一号腿关节角度、角速度与角加速度 |
| Fig.10 Joint angle, angular velocity and angular acceleration of leg one by cubic spline interpolation |
|
|