高速无人驾驶车辆轨迹跟踪和稳定性控制
Trajectory tracking and stability control of high-speed autonomous vehicle
高速无人驾驶车辆轨迹跟踪和稳定性控制 |
| 王玉琼,高松,王玉海,徐艺,郭栋,周英超 |
|
Trajectory tracking and stability control of high-speed autonomous vehicle |
| Yu-qiong WANG,Song GAO,Yu-hai WANG,Yi XU,Dong GUO,Ying-chao ZHOU |
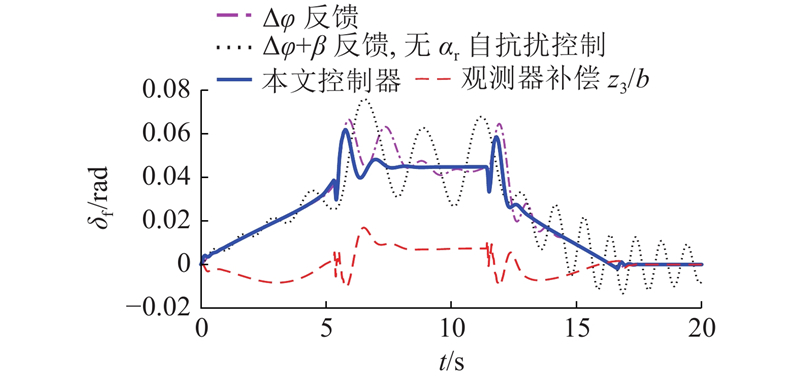
| 图 8 不同控制器的前轮转角仿真结果 |
| Fig.8 Simulation results for front-wheel steering angle of different controllers |
|
|