基于双目视觉的激光位移传感器标定方法
Calibration method of laser displacement sensor based on binocular vision
基于双目视觉的激光位移传感器标定方法 |
| 马浩然,丁雅斌 |
|
Calibration method of laser displacement sensor based on binocular vision |
| Hao-ran MA,Ya-bin DING |
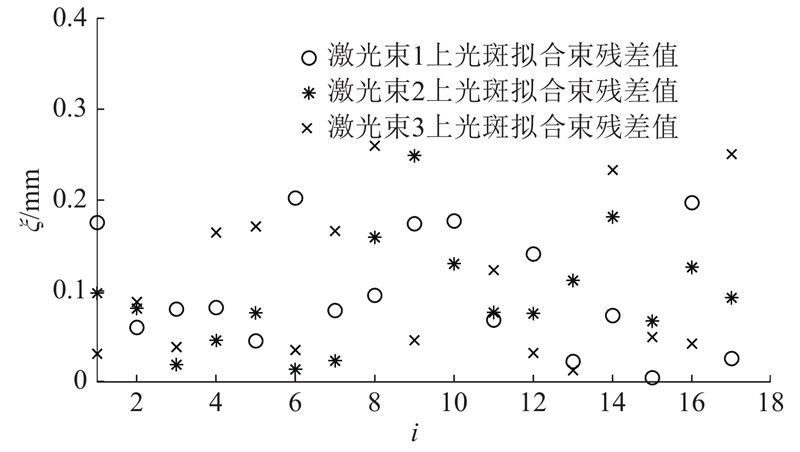
| 图 13 机器人末端坐标系下光斑拟合光束残差图 |
| Fig.13 Residual diagram of light spot fitting beam in robot terminal coordinate system |
|
|