基于观测器摩擦补偿的机电系统高精度控制
High precision control of electromechanical system based on observer friction compensation
基于观测器摩擦补偿的机电系统高精度控制 |
| 李曦,胡健,姚建勇,魏科鹏,王鹏飞,邢浩晨 |
|
High precision control of electromechanical system based on observer friction compensation |
| Xi LI,Jian HU,Jian-yong YAO,Ke-peng WEI,Peng-fei WANG,Hao-chen XING |
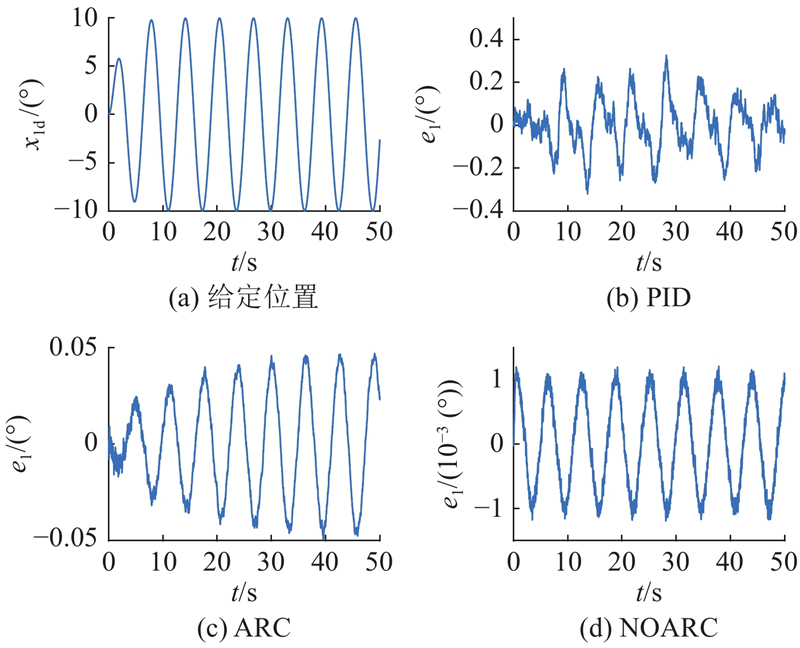
| 图 13 给定正弦位置输入及各控制器跟踪误差 |
| Fig.13 Sinusoidal position input and tracking error of each controller |
|
|