基于混合遗传算法的机器人改进摩擦模型辨识
Identification of improved friction model for robot based on hybrid genetic algorithm
基于混合遗传算法的机器人改进摩擦模型辨识 |
| 张铁,胡亮亮,邹焱飚 |
|
Identification of improved friction model for robot based on hybrid genetic algorithm |
| Tie ZHANG,Liang-liang HU,Yan-biao ZOU |
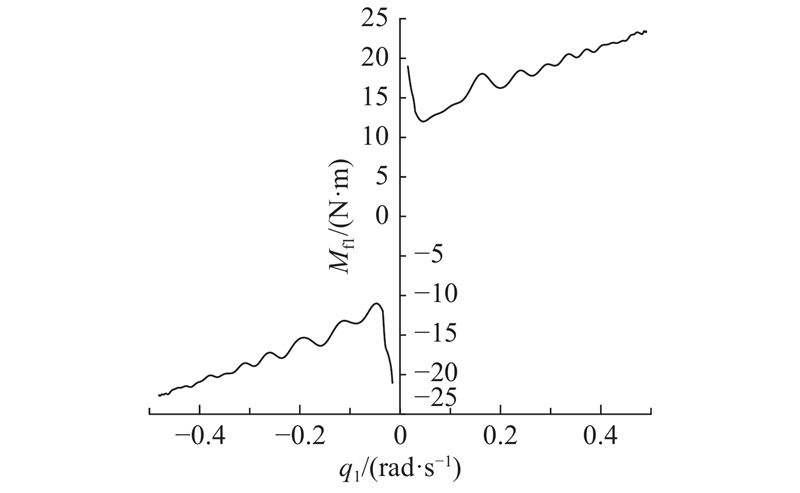
| 图 9 综合2个轨迹下关节1的实际摩擦力矩-速度图 |
| Fig.9 Diagram of actual friction torque and velocity of joint 1 for compositing two trajectories |
|
|