基于被动柔顺机理的电机遥操作更换机构设计和实验
Design and experiment of remote handling motor replacement device based on passive compliant mechanism
基于被动柔顺机理的电机遥操作更换机构设计和实验 |
| 蒋君侠,掌新辕,陶邦明,董群 |
|
Design and experiment of remote handling motor replacement device based on passive compliant mechanism |
| Jun-xia JIANG,Xin-yuan ZHANG,Bang-ming TAO,Qun DONG |
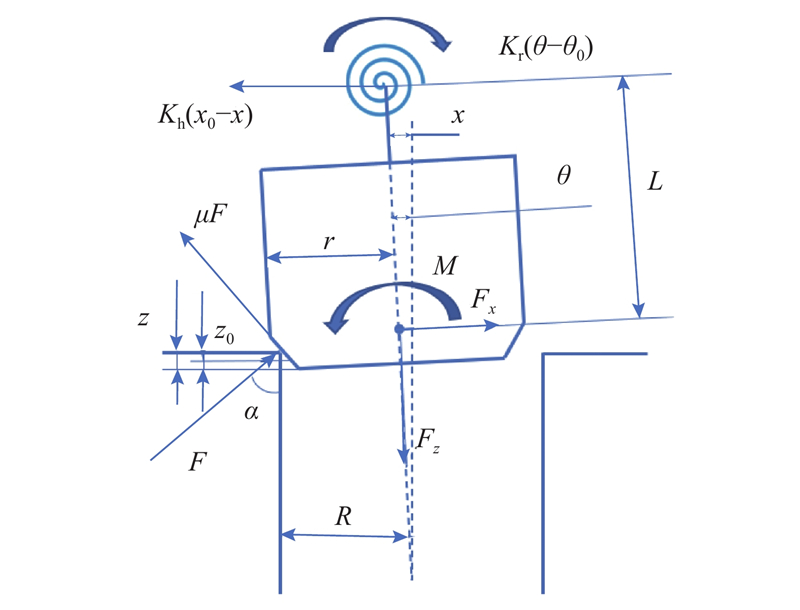
| 图 8 倒角滑移状态的力学模型 |
| Fig.8 Force model during chamfer crossing |
|
|