欠驱动异构式下肢康复机器人动力学分析及参数优化
Dynamic analysis and parameter optimization of under-actuated heterogeneous lower limb rehabilitation robot
欠驱动异构式下肢康复机器人动力学分析及参数优化 |
| 李伟达,李娟,李想,张虹淼,顾洪,史逸鹏,张浩杰,孙立宁 |
|
Dynamic analysis and parameter optimization of under-actuated heterogeneous lower limb rehabilitation robot |
| Wei-da LI,Juan LI,Xiang LI,Hong-miao ZHANG,Hong GU,Yi-peng SHI,Hao-jie ZHANG,Li-ning SUN |
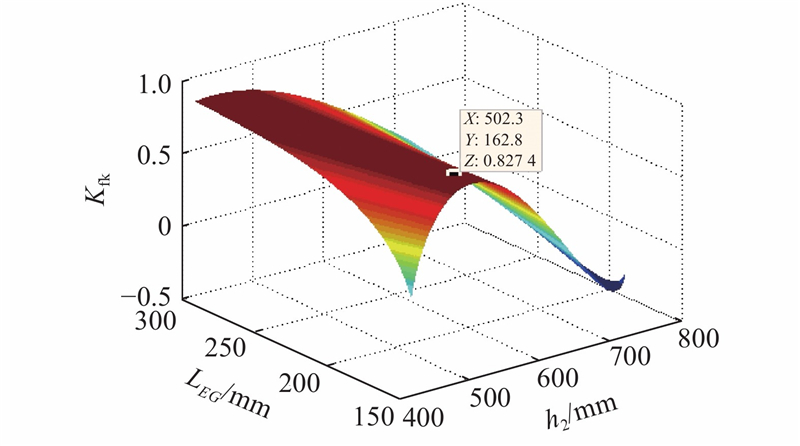
| 图 6 |
| Fig.6 Relationship of initial moment of gait cycle between |
|
|