基于运动发散分量的四足机器人步态规划
Gait planning of quadruped robot based on divergence component of motion
基于运动发散分量的四足机器人步态规划 |
| 刘明敏,曲道奎,徐方,邹风山,贾凯,宋吉来 |
|
Gait planning of quadruped robot based on divergence component of motion |
| Ming-min LIU,Dao-kui QU,Fang XU,Feng-shan ZOU,Kai JIA,Ji-lai SONG |
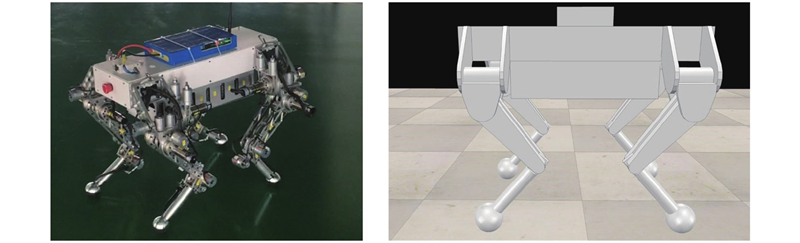
| 图 6 机器人物理样机与虚拟样机 |
| Fig.6 Robot physical prototype and virtual prototype |
|
|