基于点线特征的快速视觉SLAM方法
Fast visual SLAM method based on point and line features
基于点线特征的快速视觉SLAM方法 |
| 马鑫,梁新武,蔡纪源 |
|
Fast visual SLAM method based on point and line features |
| Xin MA,Xin-wu LIANG,Ji-yuan CAI |
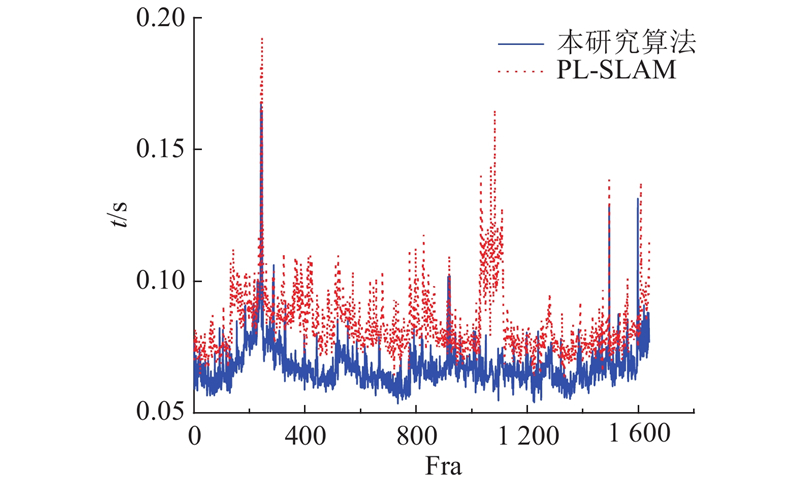
| 图 7 fr3/ntn序列上本研究算法与PL-SLAM追踪时间对比 |
| Fig.7 Comparison of tracking time between proposed method and PL-SLAM on sequence fr3/ntn |
|
|