连杆侧无传感器下机器人柔性关节系统的零力控制
Free-force control of flexible robot joint system without sensors on link side
连杆侧无传感器下机器人柔性关节系统的零力控制 |
| 徐建明,赵智鹏,董建伟 |
|
Free-force control of flexible robot joint system without sensors on link side |
| Jian-ming XU,Zhi-peng ZHAO,Jian-wei DONG |
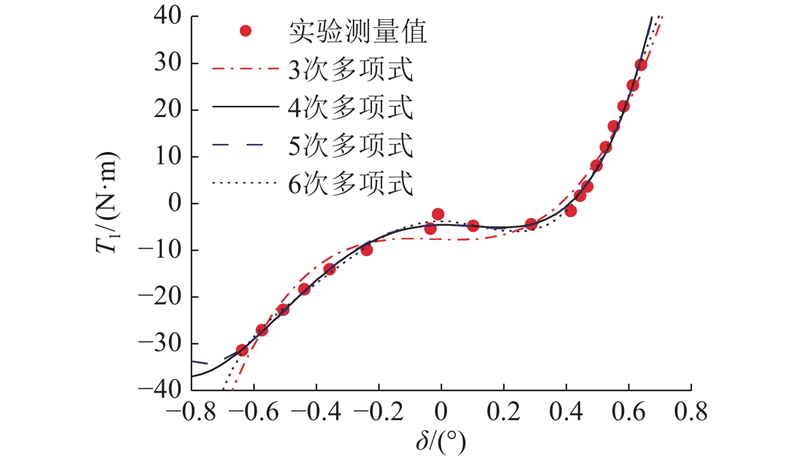
| 图 4 不同次数多项式对上支实验数据点的拟合效果 |
| Fig.4 Fitting results of experimental data points of upper branch with different degree of polynomials |
|
|