连杆侧无传感器下机器人柔性关节系统的零力控制
Free-force control of flexible robot joint system without sensors on link side
连杆侧无传感器下机器人柔性关节系统的零力控制 |
| 徐建明,赵智鹏,董建伟 |
|
Free-force control of flexible robot joint system without sensors on link side |
| Jian-ming XU,Zhi-peng ZHAO,Jian-wei DONG |
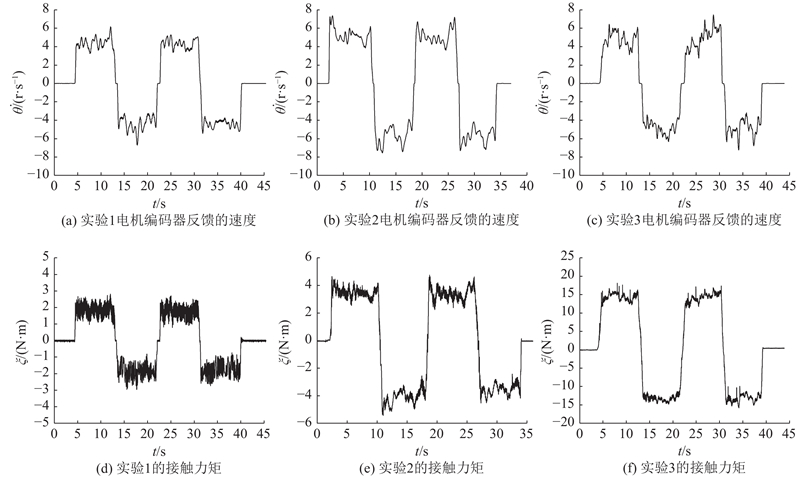
| 图 10 拖动示教实验过程中速度曲线与接触力矩曲线 |
| Fig.10 Speed and contact torque curve during drag teaching experiment |
|
|