面向视觉伺服的工业机器人轮廓曲线角点识别
Corner recognition of industrial robot contour curve for visual servoing
面向视觉伺服的工业机器人轮廓曲线角点识别 |
| 冯毅雄,李康杰,高一聪,郑浩 |
|
Corner recognition of industrial robot contour curve for visual servoing |
| Yi-xiong FENG,Kang-jie LI,Yi-cong GAO,Hao ZHENG |
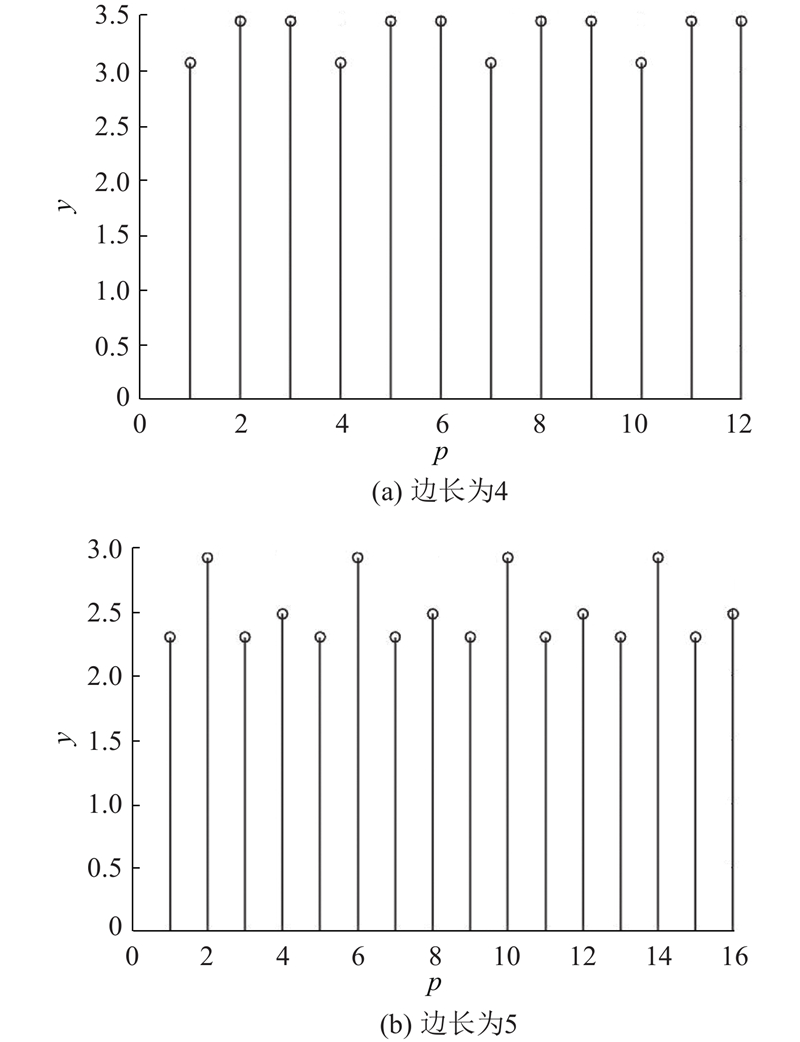
| 图 13 卷积系数2识别包围盒计算 |
| Fig.13 Calculation of recognition bounding box using convolution coefficient two |
|
|