基于线性矩阵不等式的智能车轨迹跟踪控制
Intelligent vehicle trajectory tracking control based on linear matrix inequality
基于线性矩阵不等式的智能车轨迹跟踪控制 |
| 吴海东,司振立 |
|
Intelligent vehicle trajectory tracking control based on linear matrix inequality |
| Hai-dong WU,Zhen-li SI |
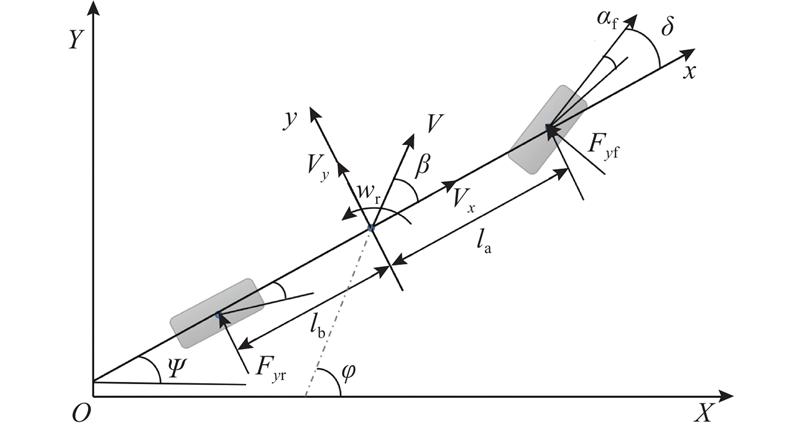
| 图 1 二自由度车辆模型 |
| Fig.1 Two degree of freedom vehicle model |
|
|