移动机器人路径动态规划有向D*算法
Directed D* algorithm for dynamic path planning of mobile robots
移动机器人路径动态规划有向D*算法 |
| 刘军,冯硕,任建华 |
|
Directed D* algorithm for dynamic path planning of mobile robots |
| Jun LIU,Shuo FENG,Jian-hua REN |
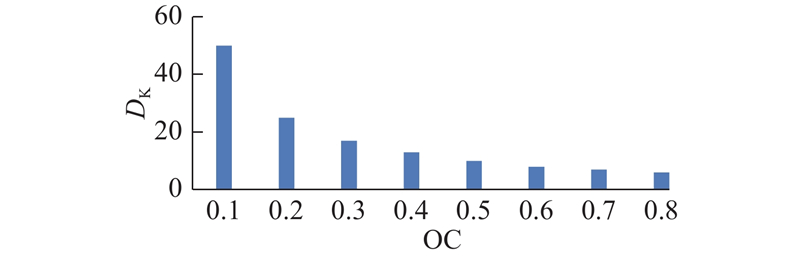
| 图 4 平均距离与障碍物覆盖率的关系 |
| Fig.4 Relationship between average distance and obstacle coverage rate |
|
|