基于模型预测控制的仿人机器人实时步态优化
Real-time walking pattern optimization for humanoid robot based on model predictive control
基于模型预测控制的仿人机器人实时步态优化 |
| 丁加涛,何杰,李林芷,肖晓晖 |
|
Real-time walking pattern optimization for humanoid robot based on model predictive control |
| Jia-tao DING,Jie HE,Lin-zhi LI,Xiao-hui XIAO |
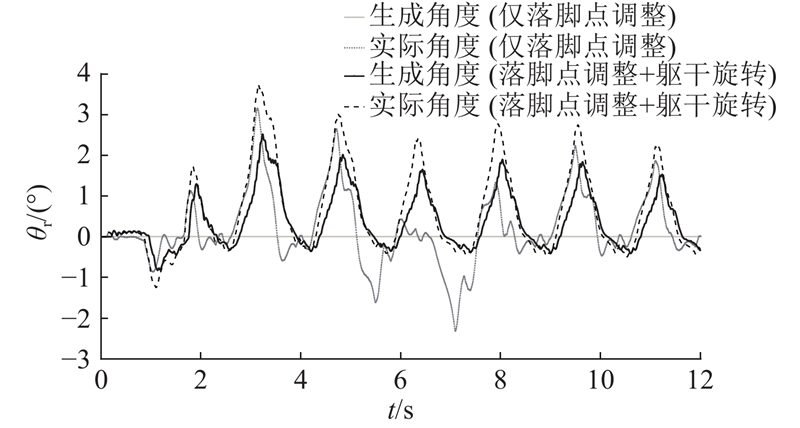
| 图 9 沿y轴负方向25 N外力作用下不同策略生成的横滚角度和实际横滚角度 |
| Fig.9 Generated and actual roll angles when using different strategies under external force(25 N along − y axis) |
|
|