不确定性扰动下双足机器人动态步行的自适应鲁棒控制
Adaptive robust control of dynamic walking of bipedal robots under uncertain disturbances
不确定性扰动下双足机器人动态步行的自适应鲁棒控制 |
| 袁海辉,葛一敏,甘春标 |
|
Adaptive robust control of dynamic walking of bipedal robots under uncertain disturbances |
| Hai-hui YUAN,Yi-min GE,Chun-biao GAN |
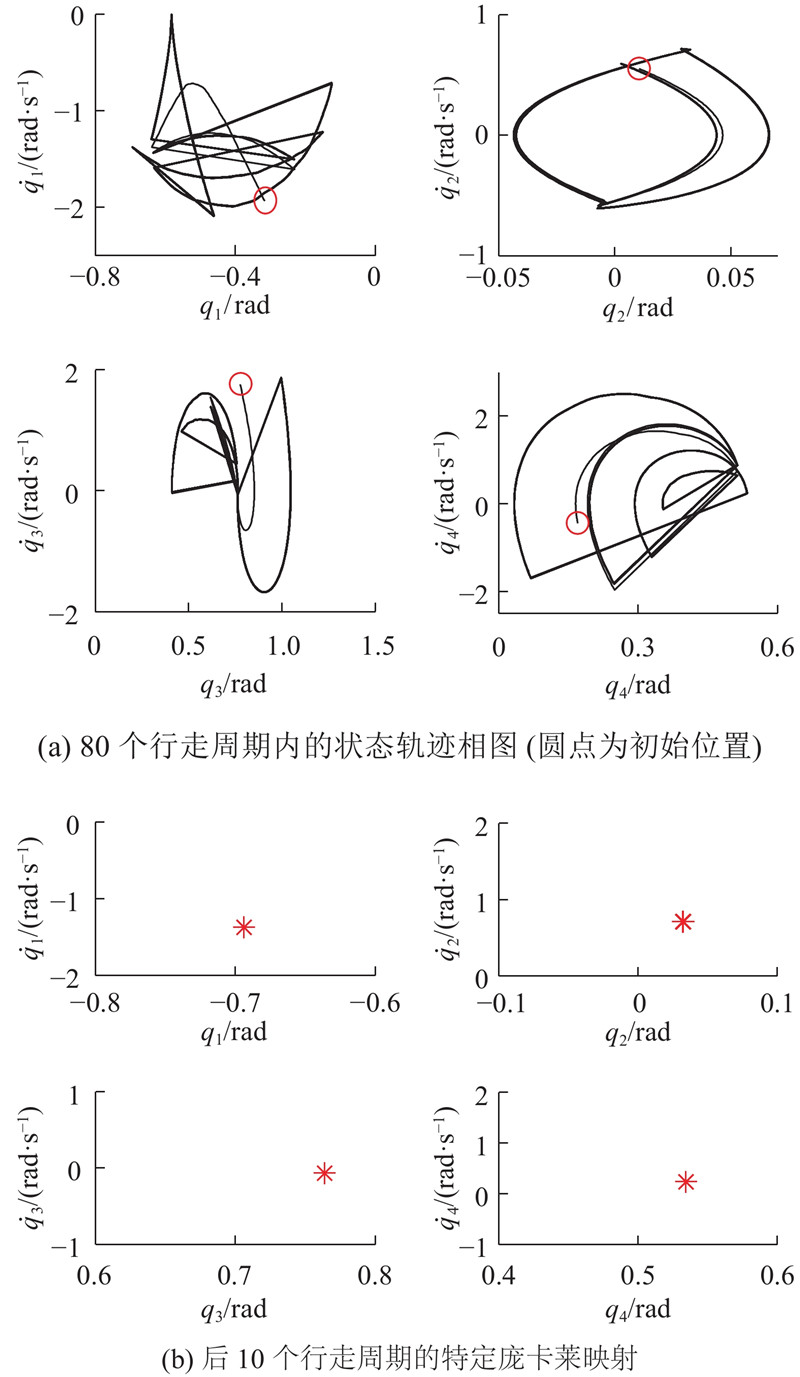
| 图 9 非平整路面上不确定性扰动作用下机器人状态轨迹相图与特定庞卡莱映射图 |
| Fig.9 Phase portraits and specific Poincaré map for biped robot subject to uncertain disturbances and uneven terrains |
|
|