不确定性扰动下双足机器人动态步行的自适应鲁棒控制
Adaptive robust control of dynamic walking of bipedal robots under uncertain disturbances
不确定性扰动下双足机器人动态步行的自适应鲁棒控制 |
| 袁海辉,葛一敏,甘春标 |
|
Adaptive robust control of dynamic walking of bipedal robots under uncertain disturbances |
| Hai-hui YUAN,Yi-min GE,Chun-biao GAN |
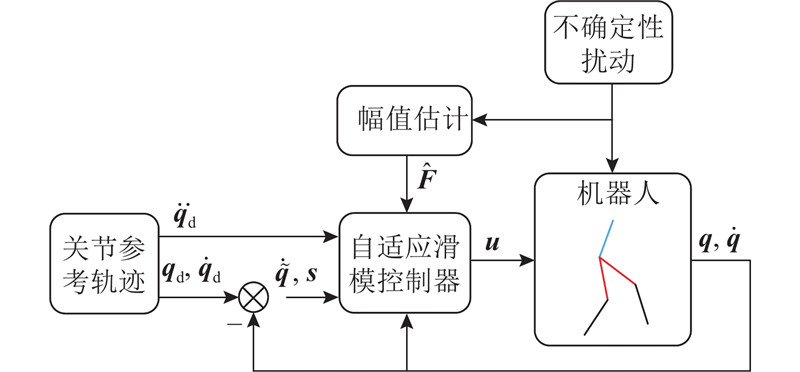
| 图 3 基于自适应滑模控制器的机器人控制系统框图 |
| Fig.3 Block diagram of robot control system based on adaptive sliding-mode controller |
|
|