机械臂非奇异快速终端滑模模糊控制
吴爱国( ),吴绍华,董娜
),吴绍华,董娜
),吴绍华,董娜
Nonsingular fast terminal sliding model fuzzy control of robotic manipulators
Ai-guo WU(),Shao-hua WU,Na DONG
),Shao-hua WU,Na DONG
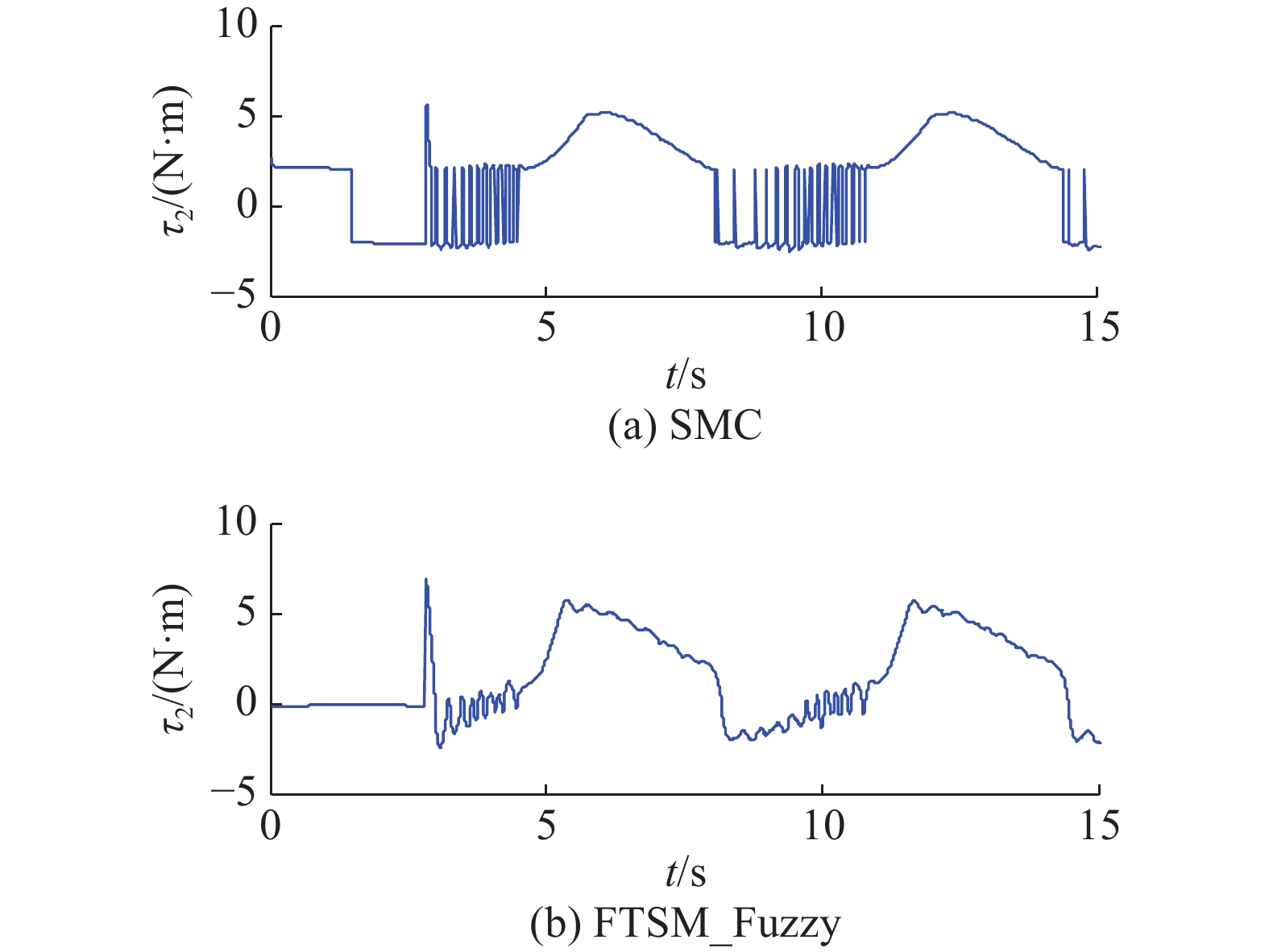
图 13. 实验中关节2控制器输出
Fig.13. Controller output of joint 2 in experiment