|
|
|
| Vehicle stability control under cornering braking failure |
Xin ZHAO( ),Wenguang LIU*(),Xi LIU,Huajun CHE,Hai WANG,Bei DING ),Wenguang LIU*(),Xi LIU,Huajun CHE,Hai WANG,Bei DING |
| School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China |
|
|
|
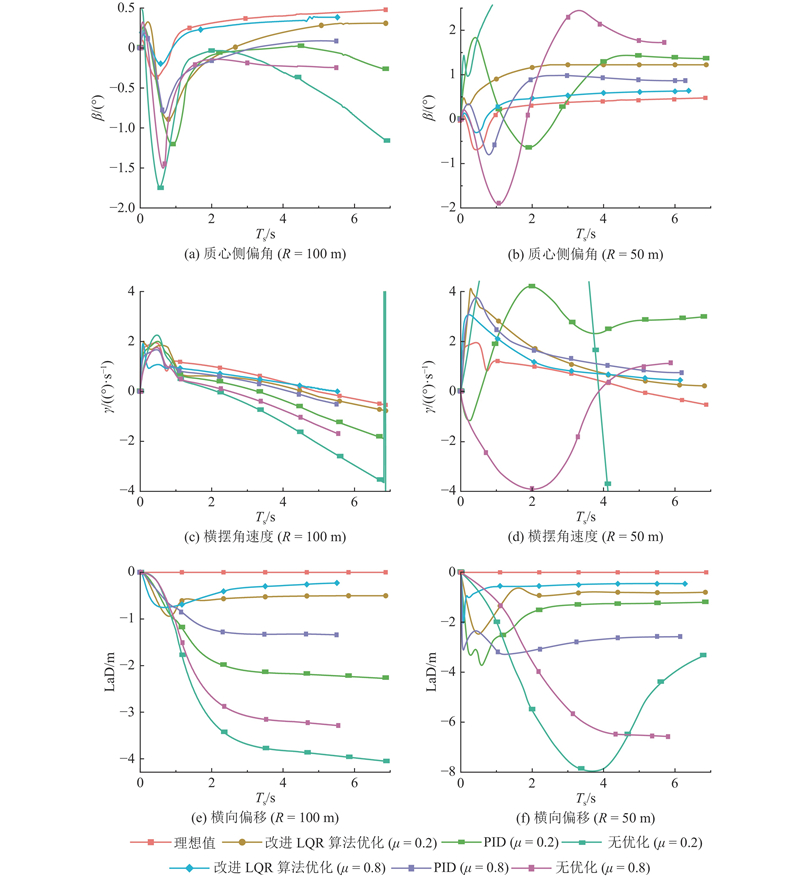
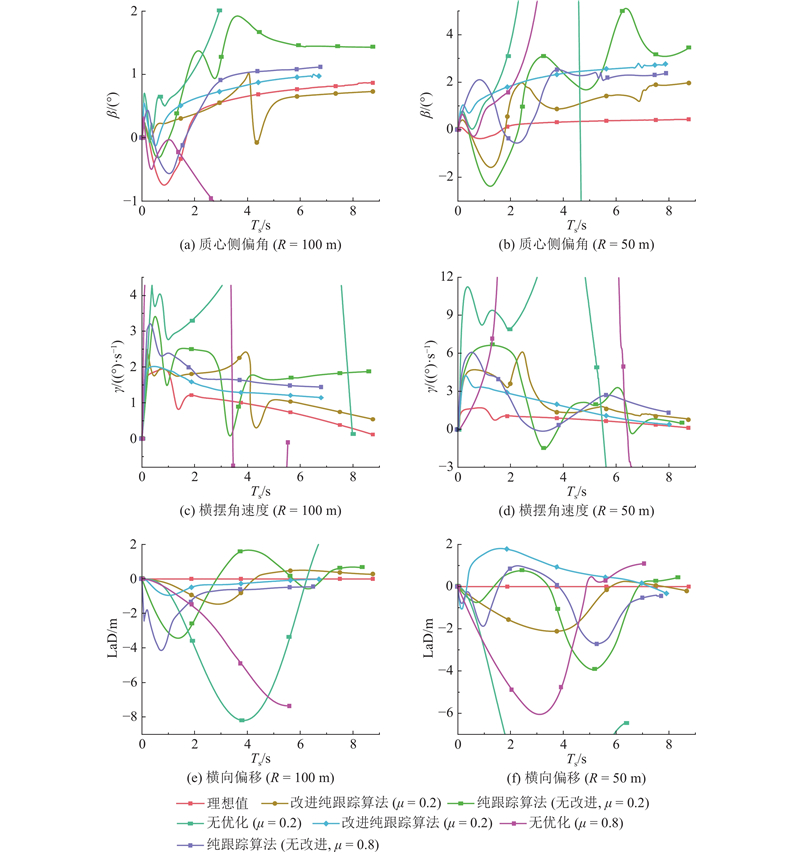
Abstract A control strategy integrating braking force redistribution and path tracking was proposed to address the problem that instability and yawing were prone to occur when vehicles equipped with electromechanical brake (EMB) system experience braking failures during cornering. Gaussian perturbation and staged optimization were introduced to improve the algorithm in order to mitigate the deficiencies of the slime mould algorithm (SMA). The enhanced SMA was employed to optimize the weight matrix of the linear quadratic regulator (LQR). The improved LQR algorithm was utilized to compute the vehicle’s yaw moment upon detection of a single-wheel failure in the EMB system, followed by braking force redistribution to maintain vehicle stability. The pure pursuit algorithm was modified by shifting the tracking control point to enhance the response speed of the algorithm. An adaptive fuzzy control algorithm was incorporated to accommodate dynamic factors such as road conditions and vehicle speed, thus improving its adaptability. Path tracking was implemented to guide the vehicle along a predefined trajectory until a safe stop when a double-wheel failure was detected in the EMB system. The experimental results demonstrated that the maximum lateral deviation was reduced by 59.15% for single-wheel failure and by 41.95% for double-wheel failure compared with conventional methods. The proposed control strategy can more effectively ensure driving safety during cornering braking failure.
|
|
Received: 15 December 2024
Published: 30 October 2025
|
|
|
| Fund: 产业前瞻与关键核心技术--竞争项目(BE2023074). |
|
Corresponding Authors:
Wenguang LIU
E-mail: 1415146477@qq.com;liuzhangwang2000@163.com
|
弯道制动失效下的车辆稳定性控制
针对配备电子机械制动(EMB)系统的车辆在弯道发生制动失效时易发生失稳跑偏的问题,提出结合制动力重构和路径跟踪的控制策略. 针对黏菌优化算法(SMA)的缺陷,引入高斯扰动和分阶段寻优改进算法的不足. 使用改进的黏菌算法,对线性二次调节器(LQR)的权重矩阵进行寻优. 当检测到EMB系统出现单轮失效时,利用改进的LQR算法计算车辆的横摆力矩,对制动力进行重构以维持车辆稳定. 对纯跟踪算法进行改进,通过转移跟踪控制点,提高算法的响应速度. 引入自适应模糊算法以考虑路面、速度各动态因素的影响,提高算法的适应性. 当检测到EMB系统出现双轮失效时,利用路径跟踪的方法,使车辆沿既定路线行驶直至安全停止. 试验结果表明,相较于传统方法,单轮失效下的横向偏差最大下降了59.15%,双轮失效的横向偏差最大下降了41.95%. 利用该控制策略,可以更有效地保证弯道制动失效时的行车安全.
关键词:
电子机械制动,
弯道制动失效,
稳定性控制,
线性二次调节器,
路径跟踪,
纯跟踪算法
|
|
| [1] |
ZHOU S, LIU J, WANG Z, et al Research on design optimization and simulation of regenerative braking control strategy for pure electric vehicle based on EMB systems[J]. Transactions of Famena, 2023, 47 (4): 33- 49
doi: 10.21278/TOF.474045522
|
|
|
| [2] |
XU Z, GERADA C Enhanced estimation of clamping-force for automotive EMB actuators using a switching extended state observer[J]. IEEE Transactions on Industrial Electronics, 2024, 71 (3): 2220- 2230
doi: 10.1109/TIE.2023.3265060
|
|
|
| [3] |
HOSEINNEZHAD R, BABHADIASHAR A, HARDING P Calibration of resolver sensors in electromechanical braking systems: a modified recursive weighted least-squares approach[J]. IEEE Transactions on Industrial Electronics, 2007, 54 (2): 1052- 1060
doi: 10.1109/TIE.2007.893049
|
|
|
| [4] |
孙丽琴, 陈欢, 张晓亮, 等 面向线控制动车辆单轮制动失效的稳定性控制[J]. 重庆理工大学学报: 自然科学, 2024, 38 (4): 55- 63
SUN Liqin, CHEN Huan, ZHANG Xiaoliang, et al Single-wheel brake failure stability control for vehicle equipped with brake-by-wire system[J]. Journal of Chongqing University of Technology: Natural Science, 2024, 38 (4): 55- 63
|
|
|
| [5] |
ZHENG L, LU Y, WANG J, et al Braking failure anti-rollover control and hardware-in-the-loop verification of wire-controlled heavy vehicles[J]. Scientific Reports, 2024, 14 (1): 29802
doi: 10.1038/s41598-024-80854-9
|
|
|
| [6] |
PARK J I, JEON K, CHOI S. Design of fail-safe controller for brake-by-wire systems using optimal braking force distribution [C]//2013 World Electric Vehicle Symposium and Exhibition. Barcelona: IEEE, 2013: 1-7.
|
|
|
| [7] |
ZHOU J, DI Y, MIAO X Single-wheel failure stability control for vehicle equipped with brake-by-wire system[J]. World Electric Vehicle Journal, 2023, 14 (7): 177
doi: 10.3390/wevj14070177
|
|
|
| [8] |
ZHANG L, PANG, Z, WANG, S, et al Electromechanical composite brake control for two in-wheel motors drive electric vehicle with single motor failure[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2020, 234 (4): 1057- 1074
doi: 10.1177/0954407019864229
|
|
|
| [9] |
TANG X, SHI L, WANG B, et al. EMB-based brake failure stability control strategy for distributed drive electric vehicles [C]//6th CAA International Conference on Vehicular Control and Intelligence. Nanjing: IEEE, 2022: 1-6.
|
|
|
| [10] |
陈佳瑶, 彭晓燕 线控制动车辆弯道制动力优化分配控制策略[J]. 机械设计, 2020, 37 (2): 1- 9
CHEN Jiayao, PENG Xiaoyan Strategy for optimal braking-force allocation of vehicles with the brake-by-wire system during a braking-in-turn maneuver[J]. Journal of Machine Design, 2020, 37 (2): 1- 9
|
|
|
| [11] |
ITO A, AZUMA S I Autonomous distributed braking and driving force control architecture based on broadcast control for vehicles with in-wheel motors on four wheels[J]. Advanced Robotics, 2024, 38 (9/10): 672- 683
doi: 10.1080/01691864.2024.2349919
|
|
|
| [12] |
刘炎. 线控制动系统制动失效工况下整车稳定性控制策略研究[D]. 长沙: 湖南大学, 2018.
LIU Yan. Research on vehicle stability control strategy of the brake-by-wire system brake failure [D]. Changsha: Hunan University, 2018.
|
|
|
| [13] |
PENG Z, NING G. 2 Dof lateral dynamic model with force input of skid steering wheeled vehicle [C]//IEEE Transportation Electrification Conference and Expo, Asia-Pacific. [S. l.]: IEEE, 2014: 1-5.
|
|
|
| [14] |
WU D, ZHANG Q, DU C, et al. Path tracking and stability control of 4WID electric vehicles based on variable prediction horizon MPC [J]. International Journal of Vehicle Design, 2024, 95(3/4): 291−319.
|
|
|
| [15] |
DING S, WANG J, ZHENG W X Second-order sliding mode control for nonlinear uncertain systems bounded by positive functions[J]. IEEE Transactions on Industrial Electronics, 2015, 62 (9): 5899- 5909
doi: 10.1109/TIE.2015.2448064
|
|
|
| [16] |
SHAN W, LI K SMC-fuzzy joint vector control of built-in permanent magnet synchronous motorized spindle[J]. Journal of Mechanical Engineering, 2022, 58 (3): 177
doi: 10.3901/JME.2022.03.177
|
|
|
| [17] |
GOKUL K S, SURESH K P, NASSAR M N, et al Real-time experimental evaluation and analysis of PID and MPC controllers using HIL setup for robust steering system of autonomous vehicles[J]. IEEE Access, 2024, 12: 74711- 74723
doi: 10.1109/ACCESS.2024.3406219
|
|
|
| [18] |
邓斌, 李维汉, 吴迪, 等 基于KFESO的四轮主动转向积分滑模控制[J]. 汽车工程, 2024, 46(1): 100-108.
DENG Bin, LI Weihan, WU Di, et al. Integral sliding mode control for four-wheel active steering based on Kalman filter extended state observer [J]. Automotive Engineering, 2024, 46(1): 100-108.
|
|
|
| [19] |
胡杰, 张志凌, 钟杰锋, 等 考虑复杂扰动的轻型商用车路径跟踪混合控制方法[J]. 汽车工程, 2024, 46 (9): 1576- 1586
HU Jie, ZHANG Zhiling, ZHONG Jiefeng, et al A hybrid control strategy for light commercial vehicle path tracking considering complex disturbances[J]. Automotive Engineering, 2024, 46 (9): 1576- 1586
|
|
|
| [20] |
丁海涛, 郭孔辉, 陈虹 汽车稳定性控制中横摆力矩决策的LQR方法[J]. 吉林大学学报: 工学版, 2010, 40 (3): 597- 601
DING Haitao, GUO Konghui, CHEN Hong LQR method for vehicle yaw moment decision in vehicle stability control[J]. Journal of Jilin University: Engineering and Technology Edition, 2010, 40 (3): 597- 601
|
|
|
| [21] |
ESKANDARIPOUR M, GOLMOHAMMADI M H, SOLTANINIA S Optimization of low-impact development facilities in urban areas using slime mould algorithm[J]. Sustainable Cities and Society, 2023, 93: 104508
doi: 10.1016/j.scs.2023.104508
|
|
|
| [22] |
LIU J, FU Y, LI Y, et al An effective theoretical and experimental analysis method for the improved slime mould algorithm[J]. Expert Systems with Applications, 2024, 247: 123299
doi: 10.1016/j.eswa.2024.123299
|
|
|
| [23] |
LUO Q, YIN S, ZHOU G, et al Multi-objective equilibrium optimizer slime mould algorithm and its application in solving engineering problems[J]. Structural and Multidisciplinary Optimization, 2023, 66 (5): 114
doi: 10.1007/s00158-023-03568-y
|
|
|
| [24] |
吴桐, 荣劲, 王军年, 等 面向转向制动工况的制动力动态分配策略[J]. 汽车工程, 2024, 46 (10): 1755- 1765
WU Tong, RONG Jing, WANG Junnian, et al Dynamic braking allocation strategy for turning-braking maneuver[J]. Automotive Engineering, 2024, 46 (10): 1755- 1765
|
|
|
| [25] |
刘英杰, 赵又群, 许健雄, 等 基于Gauss伪谱法的紧急避让汽车操纵逆动力学[J]. 机械工程学报, 2012, 48 (22): 127- 132
LIU Yingjie, ZHAO Youqun, XU Jianxiong, et al Vehicle handling inverse dynamics based on gauss pseudospectral method while encountering emergency collision avoidance[J]. Journal of Mechanical Engineering, 2012, 48 (22): 127- 132
doi: 10.3901/JME.2012.22.127
|
|
|
| [26] |
KIM S, LEE J, HAN K, et al Vehicle path tracking control using pure pursuit with MPC-based look-ahead distance optimization[J]. IEEE Transactions on Vehicular Technology, 2024, 73 (1): 53- 66
doi: 10.1109/TVT.2023.3304427
|
|
|
| [27] |
HU C, RU Y, LI X, et al Path tracking control for brake-steering tracked vehicles based on an improved pure pursuit algorithm[J]. Biosystems Engineering, 2024, 242: 1- 15
doi: 10.1016/j.biosystemseng.2024.04.006
|
|
|
| [28] |
GUAN Y, LI N, CHEN P, et al Research on path tracking control based on optimal look-ahead points[J]. International Journal of Automotive Technology, 2024, 25 (6): 1355- 1374
doi: 10.1007/s12239-024-00117-4
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|