|
|
|
| Model-free control of nonlinear train under tracking performance constraint |
Jiacheng SONG( ),Yanan ZHANG ),Yanan ZHANG |
| College of Mechanical and Electronic Engineering, Northwest A & F University, Yangling 712100, China |
|
|
|
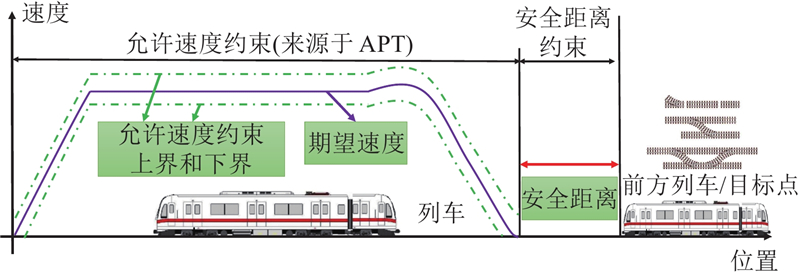
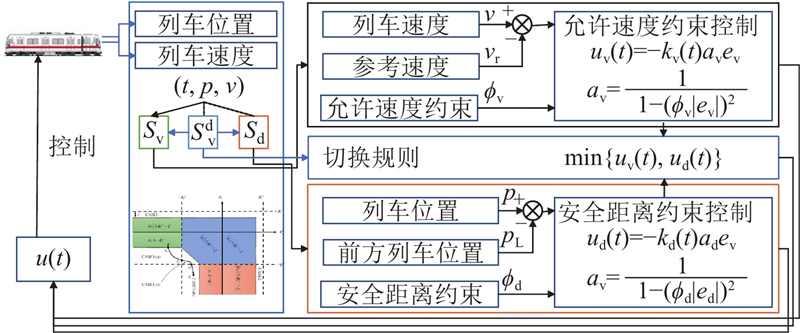
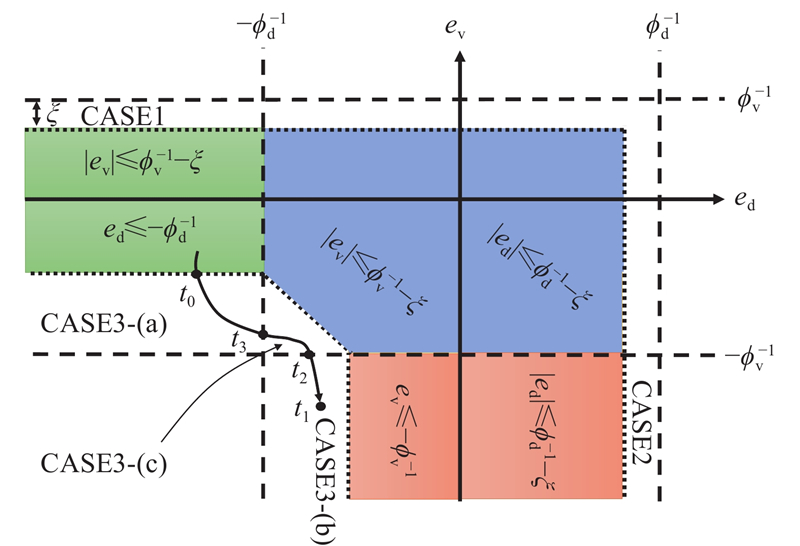
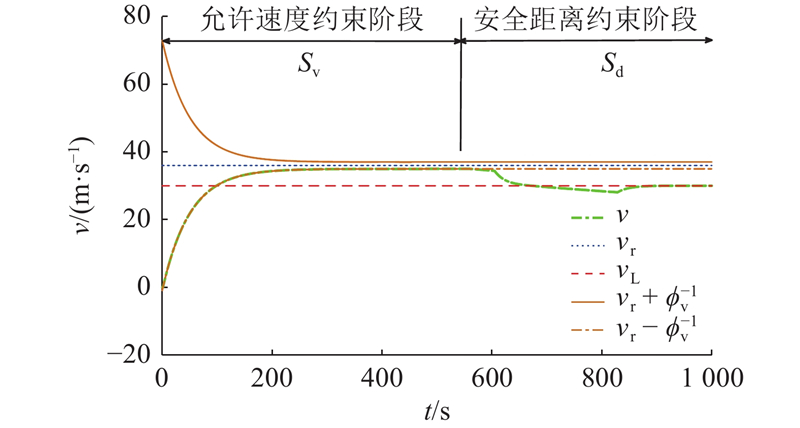
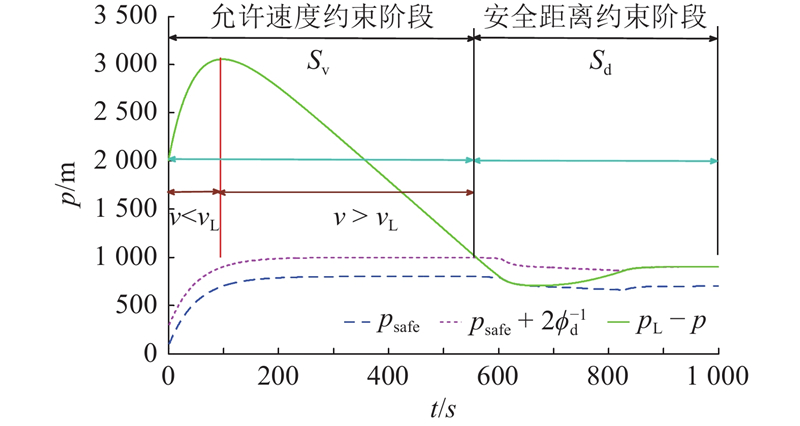
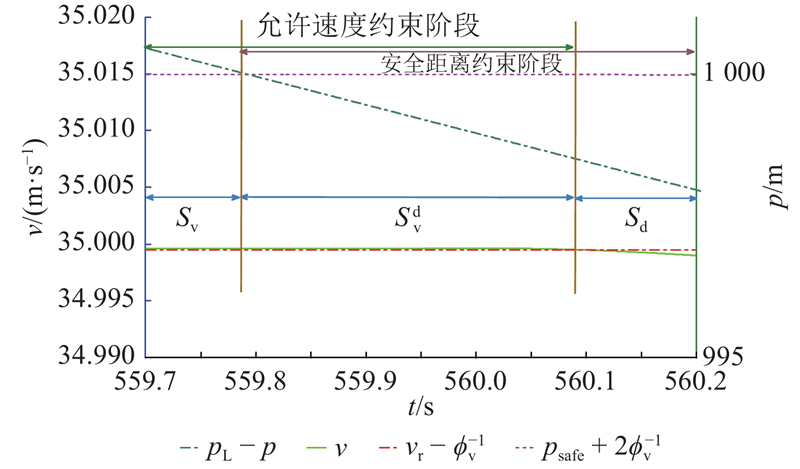
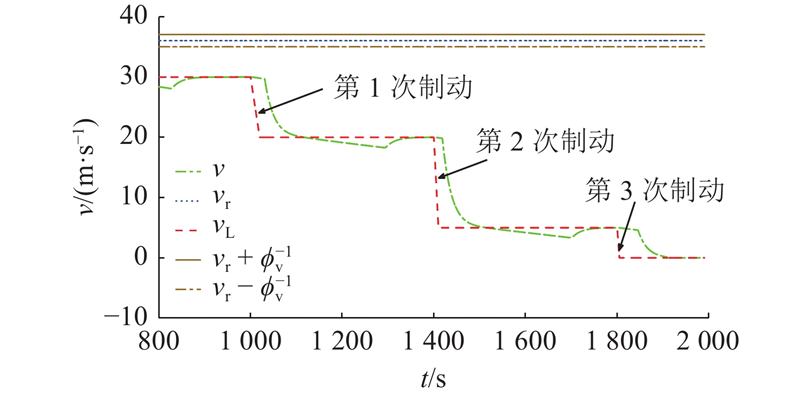
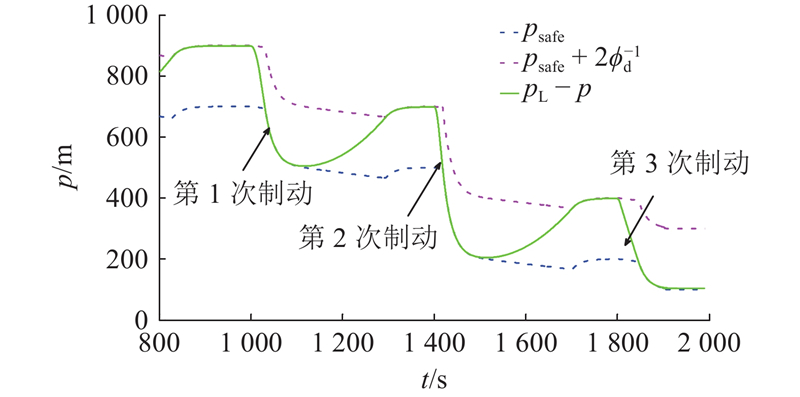
Abstract A model-free control method for automatic train operation was proposed in order to solve the nonlinear train control problem that was difficult to accurately model and had speed constraints and safety distance constraints. A tracking performance function was constructed to transform the speed tracking performance constraints and safety distance constraints into a speed error or distance error control problem with a prescribed evolution range. A model-free control algorithm based solely on speed and distance information was designed without the need for nonlinear terms of train model. A closed-loop system based on the Carathéodory function was constructed considering that the closed-loop system constructed by the proposed speed/distance controller will lead to non-convex solutions. The stability of the control system was demonstrated by analyzing the existence of the closed-loop system solution, the feasibility of the control objective, and the boundedness and continuity of the control input. The designed algorithm was applied to CRH2-A with both random and emergency verification scenarios set. The simulation results showed that the designed control method can achieve desired speed performance control when the distance from the preceding train is far, ensure safety distance performance control when approaching the preceding train or target point.
|
|
Received: 12 October 2024
Published: 30 October 2025
|
|
|
| Fund: 国家重点研发计划资助项目(2021YFA1000303);陕西省重点研发计划资助项目(2025NC-YBXM-208,2025NC- YBXM -214);陕西省博士后资助项目(2023BSHYDZZ63);西北农林科技大学科研启动资助项目(Z1090122053,Z1090124102). |
跟踪性能约束下的非线性列车无模型控制
针对难以精确建模且具有允许速度约束及安全间距约束的非线性列车控制问题,提出列车自动运行无模型控制方法. 构建跟踪性能函数,将允许速度约束及安全间距约束转换为具有允许演化范围的速度误差或距离误差控制问题,设计仅基于速度和距离的无模型反馈控制算法,无需列车模型的非线性项. 考虑到所提出的速度/距离控制器构建的闭环系统会导致非凸解,构建基于Carathéodory函数的闭环系统,解析闭环系统解的存在性、控制目标的可实现性以及控制输入的有界性和连续性,实现控制系统的稳定性证明. 将所设计的算法应用于CRH2-A,设定随机和紧急2种情况. 仿真结果表明,利用所设计的控制方法,可以在距离前方列车较远时实现期望速度性能的控制,在接近前方列车或目标点时实现安全距离的精准控制.
关键词:
列车自动驾驶,
非线性列车控制,
无模型控制,
跟踪性能约束,
列车速度跟踪控制,
列车安全间距控制
|
|
| [1] |
张淼, 张琦, 刘文韬, 等 一种基于策略梯度强化学习的列车智能控制方法[J]. 铁道学报, 2020, 42 (1): 69- 75
ZHANG Miao, ZHANG Qi, LIU Wentao, et al A policy-based reinforcement learning algorithm for intelligent train control[J]. Journal of the China Railway Society, 2020, 42 (1): 69- 75
doi: 10.3969/j.issn.1001-8360.2020.01.010
|
|
|
| [2] |
陆源源, 王慧, 宋春跃 考虑列车混行的运行-调度一体化优化方法[J]. 浙江大学学报: 工学版, 2018, 52 (1): 106- 116
LU Yuanyuan, WANG Hui, SONG Chunyue Integrated optimization method of scheduling and control in express/slow train[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (1): 106- 116
|
|
|
| [3] |
张鑫, 祝子钧, 陈凯生 基于自适应终端滑模的高速列车迭代学习速度控制[J]. 铁道学报, 2024, 46 (9): 76- 84
ZHANG Xin, ZHU Zijun, CHEN Kaisheng Adaptive terminal sliding mode based iterative learning speed control for high-speed trains[J]. Journal of the China Railway Society, 2024, 46 (9): 76- 84
doi: 10.3969/j.issn.1001-8360.2024.09.009
|
|
|
| [4] |
岳丽丽, 王一栋, 肖宝弟, 等 城轨列车自动驾驶积分反步线性自抗扰控制[J]. 湖南大学学报: 自然科学版, 2024, 51 (8): 78- 90
YUE Lili, WANG Yidong, XIAO Baodi, et al Integral back-stepping linear active disturbance rejection control for automatic operation of urban rail trains[J]. Journal of Hunan University: Natural Sciences, 2024, 51 (8): 78- 90
|
|
|
| [5] |
CAO Y, WEN J, MA L Tracking and collision avoidance of virtual coupling train control system[J]. Alexandria Engineering Journal, 2021, 60 (2): 2115- 2125
doi: 10.1016/j.aej.2020.12.010
|
|
|
| [6] |
WEI G, ZHU S, WANG Y Energy-efficient automatic train operation for high-speed railways: considering discrete notches and neutral sections[J]. Transportation Research Part C: Emerging Technologies, 2022, 145: 103884
doi: 10.1016/j.trc.2022.103884
|
|
|
| [7] |
LIU Y, ZHOU Y, SU S, et al An analytical optimal control approach for virtually coupled high-speed trains with local and string stability[J]. Transportation Research Part C: Emerging Technologies, 2021, 125: 102886
doi: 10.1016/j.trc.2020.102886
|
|
|
| [8] |
HE J, YANG X, ZHANG C, et al Tracking control via sliding mode for heavy-haul trains with input saturation[J]. Measurement and Control, 2020, 53 (9): 1720- 1729
|
|
|
| [9] |
ZHAO H, DAI X, ZHANG Q, et al Robust event-triggered model predictive control for multiple high-speed trains with switching topologies[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (5): 4700- 4710
doi: 10.1109/TVT.2020.2974979
|
|
|
| [10] |
XIAO Z, WANG Q, SUN P, et al Modeling and energy-optimal control for high-speed trains[J]. IEEE Transactions on Transportation Electrification, 2020, 6 (2): 797- 807
doi: 10.1109/TTE.2020.2983855
|
|
|
| [11] |
ZHANG Z, CHEN Z, FANG W Asymptotical cooperative cruise fault tolerant control for multiple high-speed trains with state constraints[J]. IFAC-PapersOnLine, 2023, 56 (2): 856- 861
|
|
|
| [12] |
YU W, HUANG D, WANG Q, et al Distributed event-triggered iterative learning control for multiple high-speed trains with switching topologies: a data-driven approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24 (10): 818- 829
|
|
|
| [13] |
LUO M, KE Q, LI J Research on automatic braking and traction control of high-speed train based on neural network[J]. Journal of Physics: Conference Series, 2021, 1952 (3): 032048
doi: 10.1088/1742-6596/1952/3/032048
|
|
|
| [14] |
XUN J, CHEN M, LIU Y, et al An overspeed protection mechanism for virtual coupling in railway[J]. IEEE Access, 2020, 8: 187400- 187410
doi: 10.1109/ACCESS.2020.3029147
|
|
|
| [15] |
SU S, LIU W, ZHU Q, et al A cooperative collision-avoidance control methodology for virtual coupling trains[J]. Accident Analysis and Prevention, 2022, 173: 106703
doi: 10.1016/j.aap.2022.106703
|
|
|
| [16] |
YUAN H, HUANG D, LI X Adaptive speed tracking control for high speed trains under stochastic operation environments[J]. Automatica, 2023, 147: 110674
doi: 10.1016/j.automatica.2022.110674
|
|
|
| [17] |
GAO S, WEN J, SONG H, et al Fuzzy adaptive automatic train operation control with protection constraints: a residual nonlinearity approximation-based approach[J]. Engineering Applications of Artificial Intelligence, 2020, 96 (2): 103986
|
|
|
| [18] |
FELEZ J, KIM Y, BORRELLI F A model predictive control approach for virtual coupling in railways[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20 (7): 2728- 2739
doi: 10.1109/TITS.2019.2914910
|
|
|
| [19] |
DONG H, LIN X, GAO S, et al Neural networks-based sliding mode fault-tolerant control for high-speed trains with bounded parameters and actuator faults[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (2): 1353- 1362
doi: 10.1109/TVT.2019.2961409
|
|
|
| [20] |
GAO S, HOU Y, DONG H, et al High-speed trains automatic operation with protection constraints: a resilient nonlinear gain-based feedback control approach[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6 (4): 992- 999
doi: 10.1109/JAS.2019.1911582
|
|
|
| [21] |
GAO S, LI M, ZHENG Y, et al Fuzzy adaptive protective control for high-speed trains: an outstretched error feedback approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23 (10): 966- 975
|
|
|
| [22] |
ILCHMANN A, RYAN E P, SANGWIN C J Systems of controlled functional differential equations and adaptive tracking[J]. SIAM Journal on Control and Optimization, 2002, 40 (6): 1746- 1764
doi: 10.1137/S0363012900379704
|
|
|
| [23] |
ILCHMANN A, RYAN E P, SANGWIN C J Tracking with prescribed transient behaviour[J]. ESAIM Control, Optimisation and Calculus of Variations, 2002, 7 (7): 471- 493
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|