|
|
|
| Robot task expression and planning method based on hierarchical task network |
Xingpeng FU1( ),Qun LUO2,Linbei JIANG1,Qing WANG1,*(),Peiqi ZHANG1,Yinglin KE1 ),Qun LUO2,Linbei JIANG1,Qing WANG1,*(),Peiqi ZHANG1,Yinglin KE1 |
1. Zhejiang Key Laboratory of Advanced Equipment Manufacturing and Measurement Technology, Zhejiang University, Hangzhou 310058, China
2. Xi'an Aircraft Industrial (Group) Limited Company, Xi'an 710089, China |
|
|
|
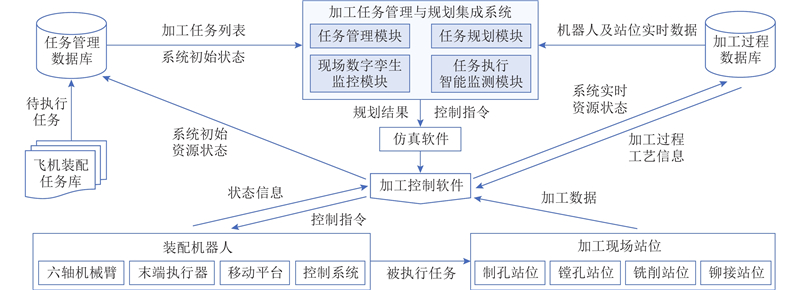
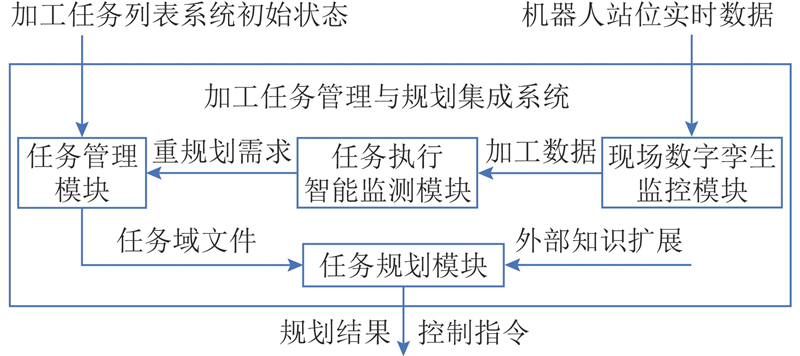
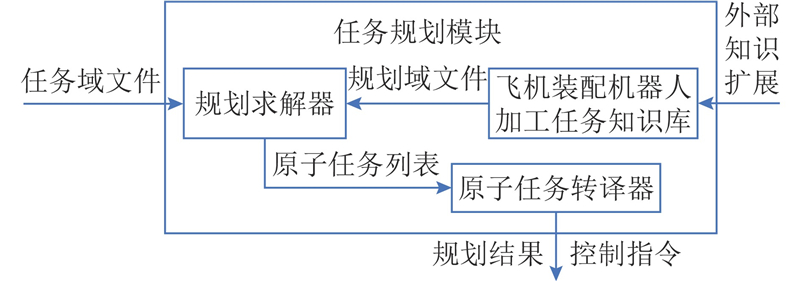
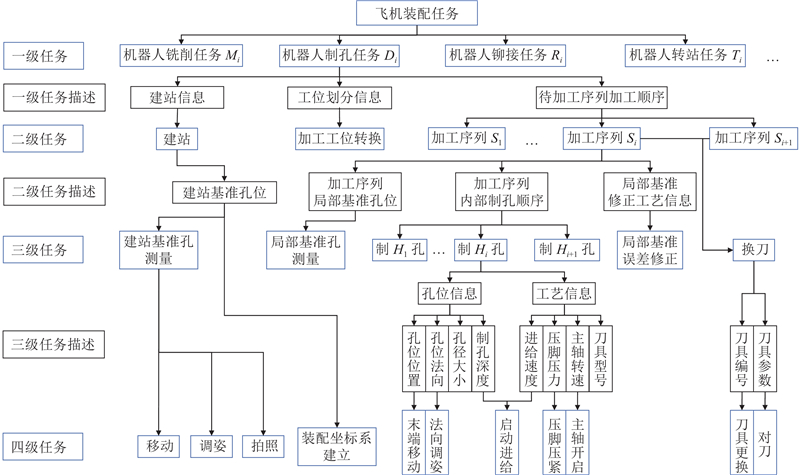
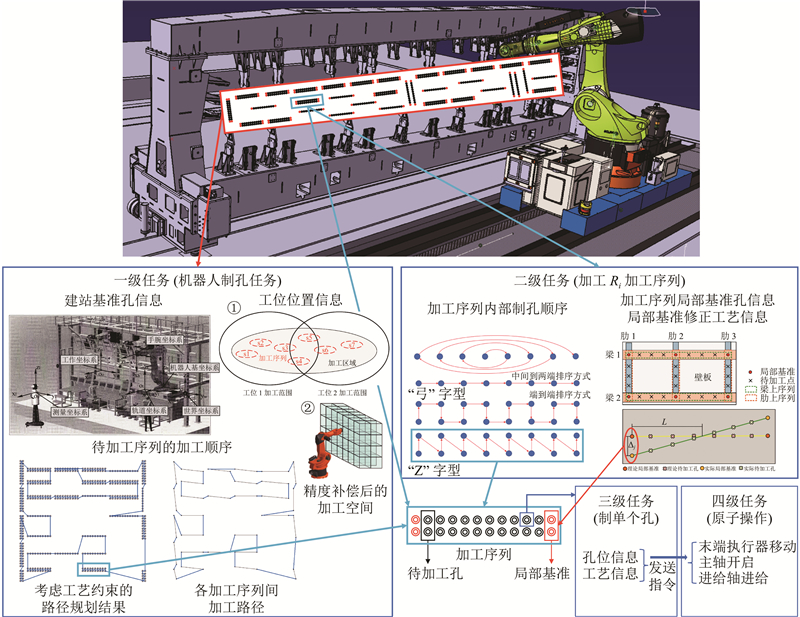
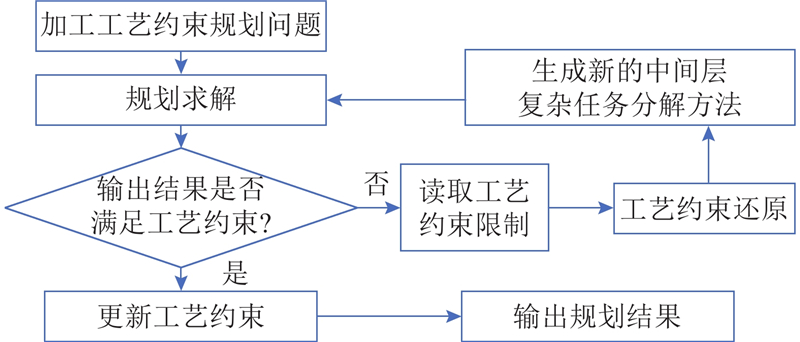
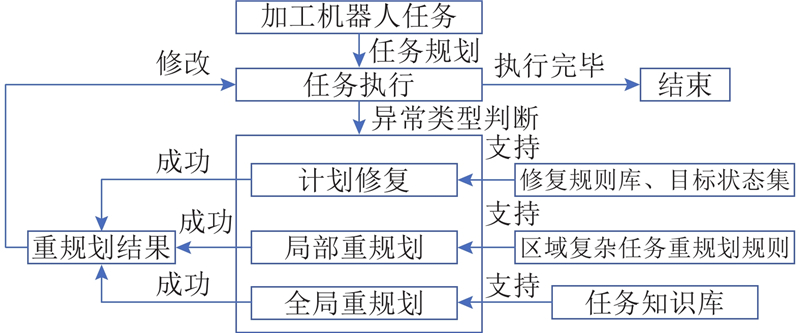
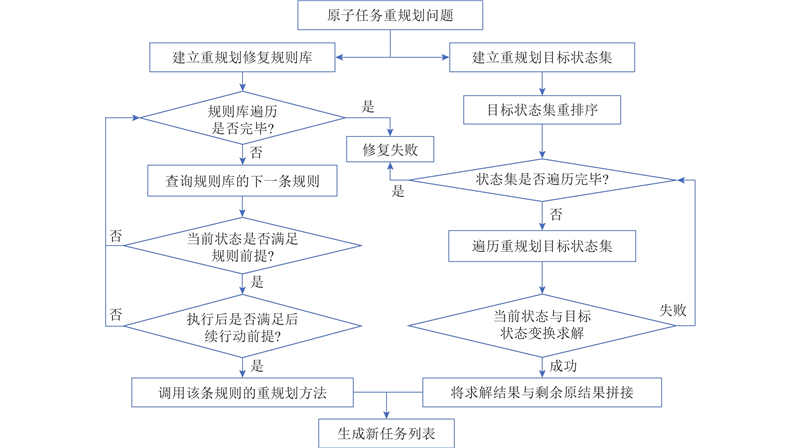
Abstract The task expression and planning methods of aircraft assembly robots were analyzed aiming at the problems of isolated operation, insufficient universality, and low degree of autonomy and intelligence of industrial robots in aircraft assembly. A task driven aircraft assembly robot processing system framework was proposed, and an integrated system for task management and planning of aircraft assembly robots was established. A hierarchical decomposition of common processing tasks in aircraft assembly sites was conducted, and a task expression method for aircraft assembly robots based on a hierarchical task network was established. A task planning process oriented towards process constraints was proposed based on the characteristics of processing tasks. A hierarchical replanning scheme for the processing system was designed based on the range of disturbance effects considering the possible external disturbances on site. The test results showed that the proposed method was used to effectively achieve task planning and replanning solution for assembly robots, improving the generality of aircraft assembly robots and the level of autonomy and intelligence in processing systems.
|
|
Received: 25 October 2024
Published: 30 October 2025
|
|
|
| Fund: 国家基础科研计划资助项目(JCKY2021205B110);国家自然科学基金资助项目(51975520). |
|
Corresponding Authors:
Qing WANG
E-mail: 22225068@zju.edu.cn;wqing@zju.edu.cn
|
基于分层任务网络的机器人任务表达与规划方法
针对飞机装配中工业机器人孤立作业、通用性不足、自主化智能化程度低的问题,研究飞机装配机器人任务表达与规划方法,提出基于任务驱动的飞机装配机器人加工系统框架,建立飞机装配机器人任务管理与规划集成系统. 针对飞机装配现场常见的加工任务,设计任务的层次化表达,建立基于分层任务网络的飞机装配机器人任务表达方法. 根据加工任务特点,提出面向工艺约束的任务规划流程. 考虑到现场可能出现的外部扰动,根据扰动作用范围分层设计系统的重规划方案. 测试结果表明,利用提出的方法,有效地实现了装配机器人的任务规划与重规划求解,提高了飞机装配机器人的通用性和加工系统的自主化智能化水平.
关键词:
飞机装配,
工业机器人,
任务管理与规划,
分层任务网络(HTN),
重规划
|
|
| [1] |
GISARIO A, KAZARIAN M, MARTINA F, et al Metal additive manufacturing in the commercial aviation industry: a review[J]. Journal of Manufacturing Systems, 2019, 53: 124- 149
doi: 10.1016/j.jmsy.2019.08.005
|
|
|
| [2] |
田威, 焦嘉琛, 李波, 等 航空航天制造机器人高精度作业装备与技术综述[J]. 南京航空航天大学学报, 2020, 52 (3): 341- 352
TIAN Wei, JIAO Jiachen, LI Bo, et al High precision robot operation equipment and technology in aerospace manufacturing[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2020, 52 (3): 341- 352
|
|
|
| [3] |
张强, 杜坤鹏, 李辉, 等 基于虚拟中心数据源的飞机装配数据集成[J]. 浙江大学学报: 工学版, 2023, 57 (8): 1667- 1679
ZHANG Qiang, DU Kunpeng, LI Hui, et al Aircraft assembly data integration based on virtual central data source[J]. Journal of Zhejiang University: Engineering Science, 2023, 57 (8): 1667- 1679
|
|
|
| [4] |
何胜强 飞机数字化装配技术体系[J]. 航空制造技术, 2010, (23): 32- 37
HE Shengqiang Digital assembly technology system of aircraft[J]. Aeronautical Manufacturing Technology, 2010, (23): 32- 37
doi: 10.3969/j.issn.1671-833X.2010.23.003
|
|
|
| [5] |
JAYAWEERA N, WEBB P Automated assembly of fuselage skin panels[J]. Assembly Automation, 2007, 27 (4): 343- 355
doi: 10.1108/01445150710827122
|
|
|
| [6] |
何胜强. 大型飞机数字化装配技术与装备[M]. 北京: 航空工业出版社, 2013.
|
|
|
| [7] |
杨亚鹏, 赵安安, 刘宇驰, 等 飞机装配自动钻铆技术研究现状与展望[J]. 机械制造与自动化, 2023, 52 (5): 1- 5
YANG Yapeng, ZHAO Anan, LIU Yuchi, et al Review and prospect of automatic drilling and riveting technology for aircraft assembly[J]. Machine Building and Automation, 2023, 52 (5): 1- 5
|
|
|
| [8] |
ROOKS B Automatic wing box assembly developments[J]. Industrial Robot, 2001, 28 (4): 297- 301
doi: 10.1108/01439910110397101
|
|
|
| [9] |
BI S, LIANG J Robotic drilling system for titanium structures[J]. The International Journal of Advanced Manufacturing Technology, 2011, 54 (5): 767- 774
|
|
|
| [10] |
董松, 郑侃, 孟丹, 等 大型复杂构件机器人制孔技术研究进展[J]. 航空学报, 2022, 43 (5): 627133
DONG Song, ZHENG Kan, MENG Dan, et al Robotic drilling of large complex components: a review[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43 (5): 627133
|
|
|
| [11] |
石峰, 徐雅丽, 孙年俊, 等 薄壁筒段件机器人铣削系统[J]. 测控技术, 2023, 42 (11): 64- 72
SHI Feng, XU Yali, SUN Nianjun, et al Robot milling system for thin-walled cylinders[J]. Measurement and Control Technology, 2023, 42 (11): 64- 72
|
|
|
| [12] |
肖庆东, 甘露, 尚江坤, 等 复合材料壁板单面紧固件机器人自动钻铆技术[J]. 航空制造技术, 2019, 62 (15): 42- 48
XIAO Qingdong, GAN Lu, SHANG Jiangkun, et al Robot automatic riveting technology for blind fastener of composite panel[J]. Aeronautical Manufacturing Technology, 2019, 62 (15): 42- 48
|
|
|
| [13] |
沈卫东. 基于云-边-端协同的焊接智能工艺规划方法研究[D]. 济南: 山东大学, 2023.
SHEN Weidong. Research on intelligent welding process planning method based on cloud-edge-terminal collaboration [D]. Jinan: Shandong University, 2023.
|
|
|
| [14] |
陈允全, 李泷杲, 黄翔, 等 基于机器人的飞机大型结构三维自动化检测方法[J]. 航空制造技术, 2019, 62 (10): 51- 57
CHEN Yunquan, LI Shuanggao, HUANG Xiang, et al Three-dimensional automatic detection method for large-scale structure of aircraft based on robot[J]. Aeronautical Manufacturing Technology, 2019, 62 (10): 51- 57
|
|
|
| [15] |
雷沛, 夏凤琴, 孙海龙, 等 面向飞机大部件的密封胶自动涂覆机器人系统研究[J]. 航空制造技术, 2023, 66 (12): 59- 67
LEI Pei, XIA Fengqin, SUN Hailong, et al Research on automatic sealant coating robot system for aircraft large components[J]. Aeronautical Manufacturing Technology, 2023, 66 (12): 59- 67
|
|
|
| [16] |
DEVLIEG R. Robotic trailing edge flap drilling system [R]. Warrendale: SAE Technical Paper Series, 2009.
|
|
|
| [17] |
付鹏强, 苗宇航, 王义文, 等 航空领域机器人自动钻孔研究进展及关键技术综述[J]. 智能系统学报, 2022, 17 (5): 874- 885
FU Pengqiang, MIAO Yuhang, WANG Yiwen, et al A review of research progress and key technologies of robotic drilling in aviation[J]. CAAl Transactions on Intelligent Systems, 2022, 17 (5): 874- 885
doi: 10.11992/tis.202106049
|
|
|
| [18] |
刘军 机器人自动制孔技术在飞机装配中的应用[J]. 航空制造技术, 2014, (17): 104- 107
LIU Jun Application of robot automatic drilling technology in aircraft assembly[J]. Aeronautical Manufacturing Technology, 2014, (17): 104- 107
doi: 10.3969/j.issn.1671-833X.2014.17.017
|
|
|
| [19] |
吴迪. 基于HTN规划技术在航天器上的应用研究[D]. 北京: 中国科学院大学, 2019.
WU Di. Application research on spacecraft based on HTN planning technology [D]. Beijing: University of Chinese Academy of Sciences, 2019.
|
|
|
| [20] |
董洁亮. 基于HTN的实时决策系统及相关算法研究[D]. 上海: 上海交通大学, 2014.
DONG Jieliang. The study on HTN-based real-time planning system and related algorithms [D]. Shanghai: Shanghai Jiao Tong University, 2014.
|
|
|
| [21] |
ILGHAMI O. Documentation for JSHOP2 [R]. Maryland: University of Maryland, 2006.
|
|
|
| [22] |
朱文杰. 飞机壁板机器人制孔系统换刀技术研究[D]. 杭州: 浙江大学, 2020.
ZHU Wenjie. Research on tool replacement technology of robot drilling system for aircraft panel [D]. Hangzhou: Zhejiang University, 2020.
|
|
|
| [23] |
李鹏程, 李明宇, 郑炜, 等 基于接触式压力脚的机器人制孔法向检测与调姿方法[J]. 计算机集成制造系统, 2023, 29 (3): 731- 739
LI Pengcheng, LI Mingyu, ZHENG Wei, et al Contact-type pressure foot-based detection and adjusting method of normal direction for robotic drilling system[J]. Computer Integrated Manufacturing Systems, 2023, 29 (3): 731- 739
|
|
|
| [24] |
郭英杰, 顾钒, 董辉跃, 等 压脚压紧力作用下的机器人变形预测和补偿[J]. 浙江大学学报: 工学版, 2020, 54 (8): 1457- 1465
GUO Yingjie, GU Fan, DONG Huiyue, et al Prediction and compensation of robot deformation under pressure force of pressure foot[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (8): 1457- 1465
|
|
|
| [25] |
冯昌源. 机器人自动钻铆系统离线轨迹与姿态优化方法研究[D]. 南京: 南京航空航天大学, 2020.
FENG Changyuan. Research on off-line trajectory and attitude optimization method of robot automatic drilling and riveting system [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2020.
|
|
|
| [26] |
吴思航. 基于CAA平台的飞机装配制孔离线编程及仿真系统研究[D]. 杭州: 浙江大学, 2023.
WU Sihang. Research on offline programming and simulation system of aircraft assembly automatic drilling based on CAA platform [D]. Hangzhou: Zhejiang University, 2023.
|
|
|
| [27] |
宋沐民, 路飞, 陆娜, 等 智能空间下基于分层任务网络的服务机器人任务规划[J]. 控制理论与应用, 2014, 31 (7): 901- 907
SONG Mumin, LU Fei, LU Na, et al Task planning for service robot with hierarchical task network in intelligent space[J]. Control Theory and Applications, 2014, 31 (7): 901- 907
doi: 10.7641/CTA.2014.31386
|
|
|
| [28] |
HAYASHI H, CHO K, OHSUGA A A new HTN planning framework for agents in dynamic environments[J]. Transactions of the Japanese Society for Artificial Intelligence, 2004, 19 (4): 108- 133
|
|
|
| [29] |
邵天浩, 张宏军, 程恺, 等 层次任务网络中的重新规划研究综述[J]. 系统工程与电子技术, 2020, 42 (12): 2833- 2846
SHAO Tianhao, ZHANG Hongjun, CHENG Kai, et al Review of replanning in hierarchical task network[J]. Journal of Systems Engineering and Electronics, 2020, 42 (12): 2833- 2846
doi: 10.3969/j.issn.1001-506X.2020.12.21
|
|
|
| [30] |
薛宏, 罗群, 刘博锋, 等 大飞机活动翼面机器人自动制孔应用研究[J]. 航空制造技术, 2019, 62 (19): 86- 91
XUE Hong, LUO Qun, LIU Bofeng, et al Research on application of robot automatic drilling in large aircraft moveable airfoil[J]. Aeronautical Manufacturing Technology, 2019, 62 (19): 86- 91
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|