| 图形模拟与目标跟踪 |
|


|
|
|
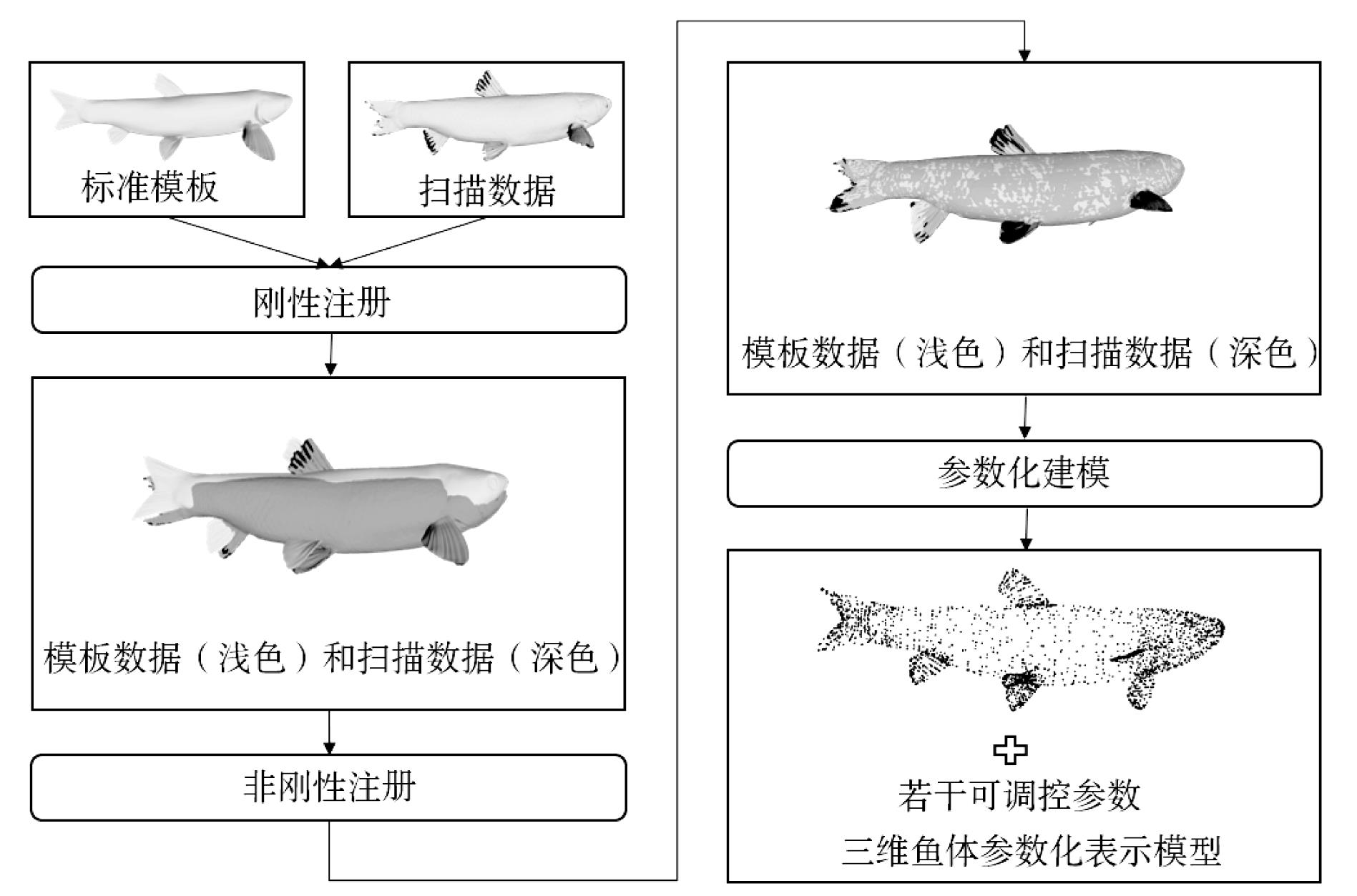
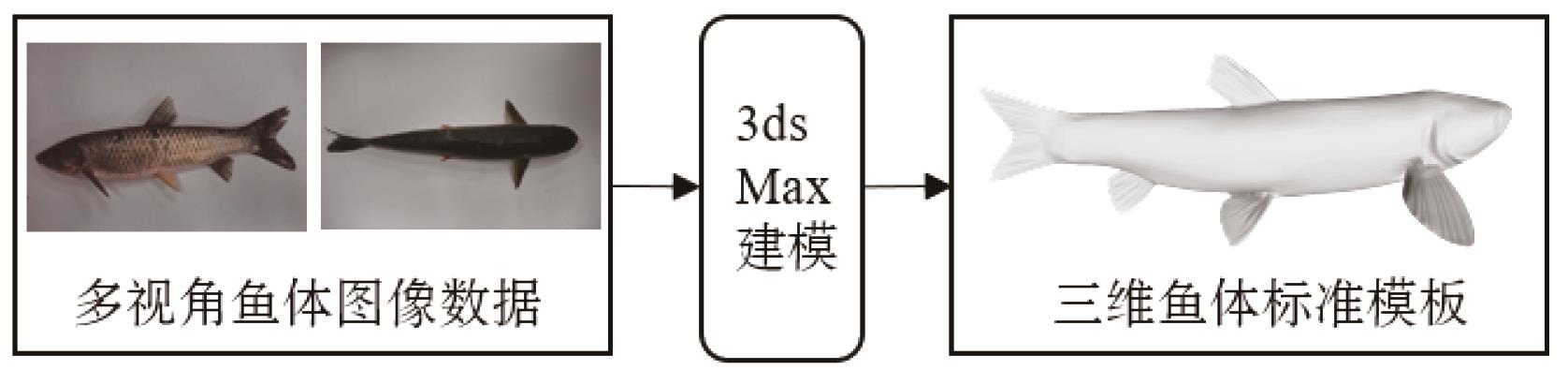
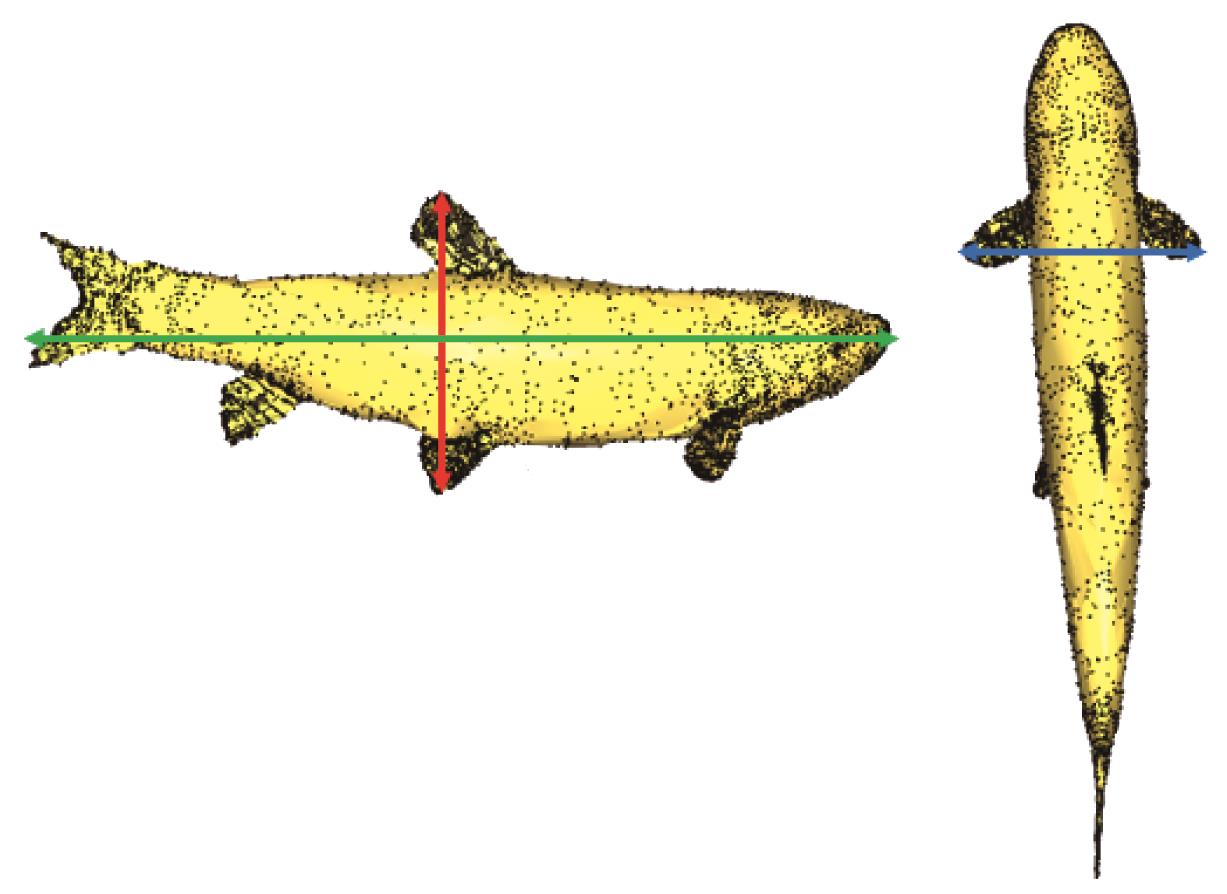
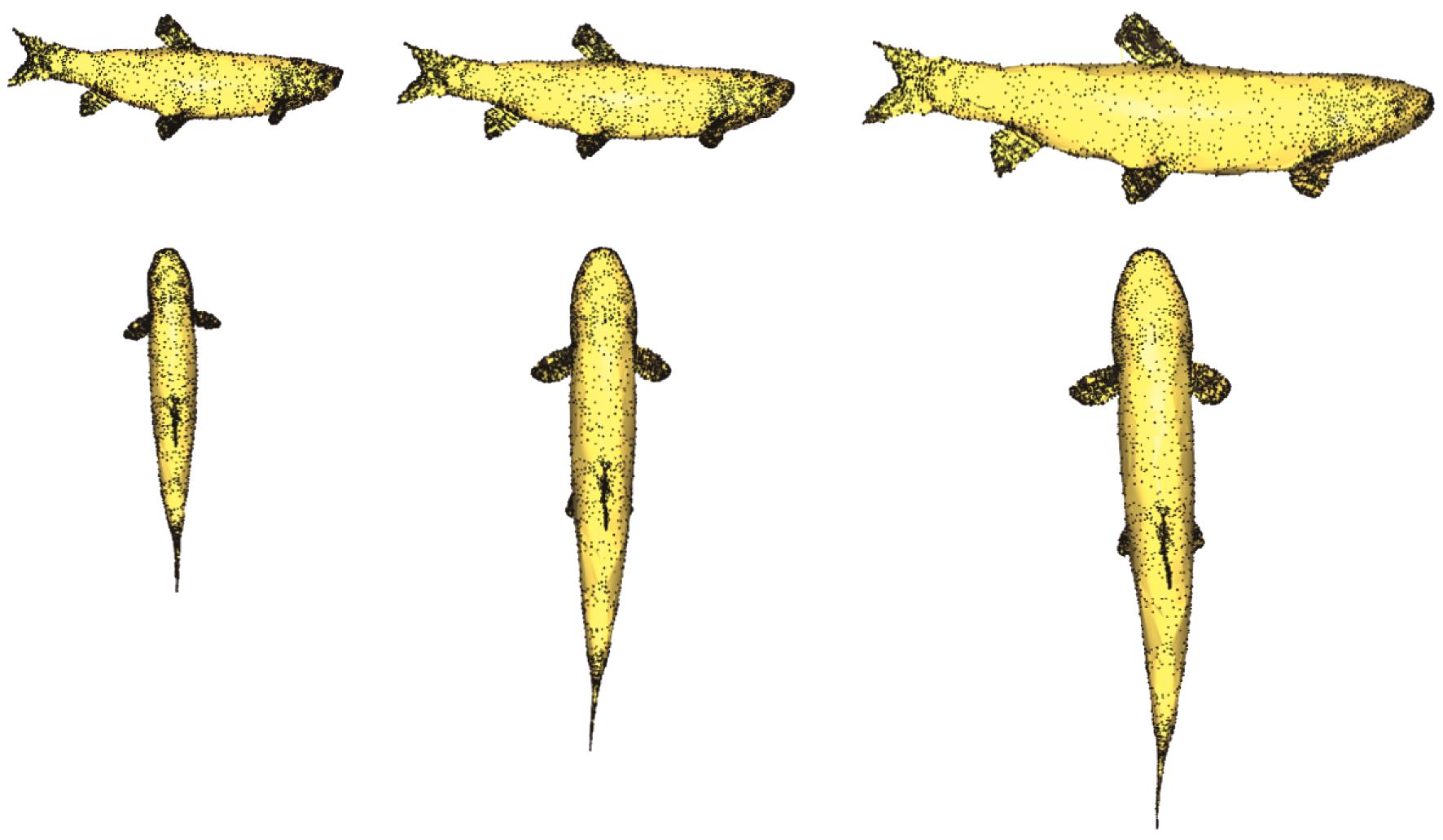
| 三维鱼体参数化建模 |
胡海涛1,赵银君1,石敏1( ),赵国亮1,朱登明2 ),赵国亮1,朱登明2 |
1.华北电力大学 控制与计算机工程学院,北京 102206
2.中国科学院计算技术研究所 前瞻研究实验室,北京 100190 |
|
| Parametric modeling of 3D fish body |
| Haitao HU1,Yinjun ZHAO1,Min SHI1(),Guoliang ZHAO1,Dengming ZHU2 |
1.School of Control and Computer Engineering,North China Electric Power University,Beijing 102206,China
2.Virtual Reality Laboratory,Institute of Computing Technology,Chinese Academy of Sciences,Beijing 100190,China |
引用本文:
胡海涛,赵银君,石敏,赵国亮,朱登明. 三维鱼体参数化建模[J]. 浙江大学学报(理学版), 2022, 49(1): 19-26.
Haitao HU,Yinjun ZHAO,Min SHI,Guoliang ZHAO,Dengming ZHU. Parametric modeling of 3D fish body. Journal of Zhejiang University (Science Edition), 2022, 49(1): 19-26.
链接本文:
https://www.zjujournals.com/sci/CN/10.3785/j.issn.1008-9497.2022.01.003
或
https://www.zjujournals.com/sci/CN/Y2022/V49/I1/19
|
| 1 |
BERTALANFFY L VON. A quantitative theory of organic growth(inquiries on growth laws II)[J]. Human Biology, 1938, 10(2):181-213.
|
| 2 |
SIMMONDS E J, MACLENNAN D N. Fisheries Acoustics, Theory and Practices-Fish and Fisheries Series[M]. 2nd ed. Oxford: Blackwell Publishing, 2005:437.
|
| 3 |
MONTERO D, IZQUIERDO M S, TORT L, et al. High stocking density produces crowding stress altering some physiological and biochemical parameters in gilthead seabream, Sparus aurata, juveniles[J]. Fish Physiology and Biochemistry, 1999, 20(1): 53-60. DOI:10.1023/A:1007719928905
doi: 10.1023/A:1007719928905
|
| 4 |
MASSOT-CAMPOS M, OLIVER-CODINA G. Evaluation of a laser based structured light system for 3D reconstruction of underwater environments[C]// 5th Martech International Workshop on Marine Technology. Girona: SARTI, 2013. doi:10.1109/icsens.2014.6985208
doi: 10.1109/icsens.2014.6985208
|
| 5 |
BRUNO F, BIANCO G, MUZZUPAPPA M, et al. Experimentation of structured light and stereo vision for underwater 3D reconstruction[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66(4): 508-518. DOI:10.1016/j.isprsjprs. 2011. 02.009
doi: 10.1016/j.isprsjprs. 2011. 02.009
|
| 6 |
YAU T H Y. Underwater Camera Calibration and 3D Reconstruction[D]. Edmonton: University of Alberta, 2014: 524-531. DOI:10.7939/R3ZC7S30V
doi: 10.7939/R3ZC7S30V
|
| 7 |
CHEN L Y. Surface reconstruction based on the 3D laser scanner[J]. Applied Mechanics and Materials, 2012,215/216:656-659. DOI:10.4028/www.scientific. net/amm.215-216.656
doi: 10.4028/www.scientific. net/amm.215-216.656
|
| 8 |
LI X S, QIN K Y, YAO P, et al. 3D surface reconstruction based on binocular vision[C]// 2014 IEEE International Conference on Mechatronics and Automation. Piscataway: IEEE, 2014: 1861-1865. DOI:10.1109/ICMA.2014.6885985
doi: 10.1109/ICMA.2014.6885985
|
| 9 |
ALLEN B, CURLESS B, POPOVIC Z. The space of human body shapes: Reconstruction and parameterization from range scans[J]. ACM Transactions on Graphics, 2003, 22(3): 587-594. DOI:10.1145/882262.882311
doi: 10.1145/882262.882311
|
| 10 |
ANGUELOV D, SRINIVASAN P, KOLLER D, et al. SCAPE: Shape completion and animation of people[J]. ACM Transactions on Graphics, 2005, 24(3): 408-416. DOI:10.1145/1073204.1073207
doi: 10.1145/1073204.1073207
|
| 11 |
LOPER M, MAHMOOD N, ROMERO J, et al. SMPL: A skinned multi-person linear model[J]. ACM Transactions on Graphics, 2015, 34(6):1-16: DOI:10.1145/2816795.2818013
doi: 10.1145/2816795.2818013
|
| 12 |
OSMAN A A A, BOLKART T, BLACK M J. STAR: Sparse trained articulated human body regressor[C]// Proceedings of the European Conference on Computer Vision. Cham: Springer, 2020: 598-613. DOI:10.1007/978-3-030-58539-6_36
doi: 10.1007/978-3-030-58539-6_36
|
| 13 |
BESL P J, MCKAY H D. A method for registration of 3D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. DOI:10.1109/34.121791
doi: 10.1109/34.121791
|
| 14 |
AMBERG B, ROMDHANI S, VETTER T. Optimal step nonrigid ICP algorithms for surface registration[C]// IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2007: 1-8. DOI:10.1109/CVPR.2007.383165
doi: 10.1109/CVPR.2007.383165
|
| 15 |
LI K, YANG J Y, LAI Y K, et al. Robust non-rigid registration with reweighted position and transformation sparsity[J]. IEEE Transactions on Visualization and Computer Graphics, 2019, 25(6):2255-2269. DOI:10.1109/TVCG. 2018. 2832136
doi: 10.1109/TVCG. 2018. 2832136
|
| 16 |
YAO Y X, DENG B L, XU W W, et al. Quasi-Newton solver for robust non-rigid registration[C]// IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 7597-7606. DOI:10.1109/CVPR42600.2020.00762
doi: 10.1109/CVPR42600.2020.00762
|
| 17 |
TU X Y, TERZOPOULOS D. Artificial fishes: Physics, locomotion, perception, behavior[C]// Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques. New York: Association for Computing Machinery, 1994: 43-50. DOI:10.1145/192161.192170
doi: 10.1145/192161.192170
|
| 18 |
ANDERSON J M, CHHABRA N K. Maneuvering and stability performance of a robotic tuna[J]. Integrative & Comparative Biology, 2002, 42(1):118-126. doi:10.1093/icb/42.1.118
doi: 10.1093/icb/42.1.118
|
| 19 |
BARRETT D S, TRIANTAFYLLOU M S, YUE D K P, et al. Drag reduction in fish-like locomotion[J]. Journal of Fluid Mechanics, 1999, 392: 183-212. DOI:10.1017/S0022112099005455
doi: 10.1017/S0022112099005455
|
| 20 |
MARCHESE A D, ONAL C D, RUS D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators[J]. Soft Robotics, 2014, 1(1): 75-87. DOI:10.1089/soro. 2013.0009
doi: 10.1089/soro. 2013.0009
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|