基于相对精度指标的机器人运动学校准
Kinematic calibration for robots based on relative accuracy
基于相对精度指标的机器人运动学校准 |
| 毛晨涛,陈章位,张翔,祖洪飞 |
|
Kinematic calibration for robots based on relative accuracy |
| Chen-tao MAO,Zhang-wei CHEN,Xiang ZHANG,Hong-fei ZU |
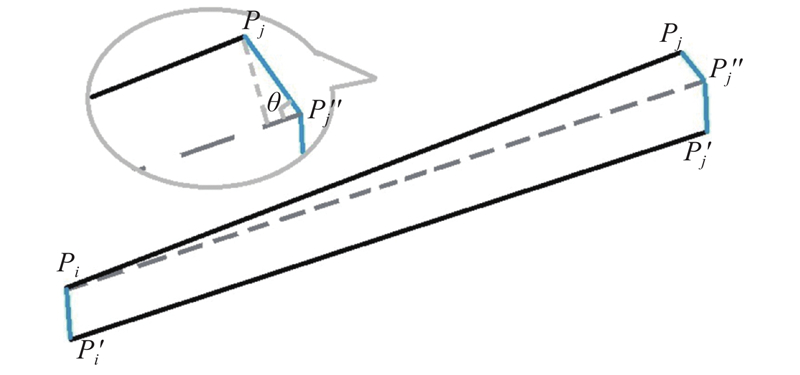
| 图 2 机器人末端两点间距离误差的线性近似 |
| Fig.2 Linearization of distance errors between two end-points |
|
|