采用恒频参量激励的微机械陀螺驱动控制方案
MEMS gyroscopes parametric excitation control scheme with constant resonant frequency
采用恒频参量激励的微机械陀螺驱动控制方案 |
| 林一羽,郑旭东,吴海斌,马志鹏,金仲和 |
|
MEMS gyroscopes parametric excitation control scheme with constant resonant frequency |
| Yi-yu LIN,Xu-dong ZHENG,Hai-bin WU,Zhi-peng MA,Zhong-he JIN |
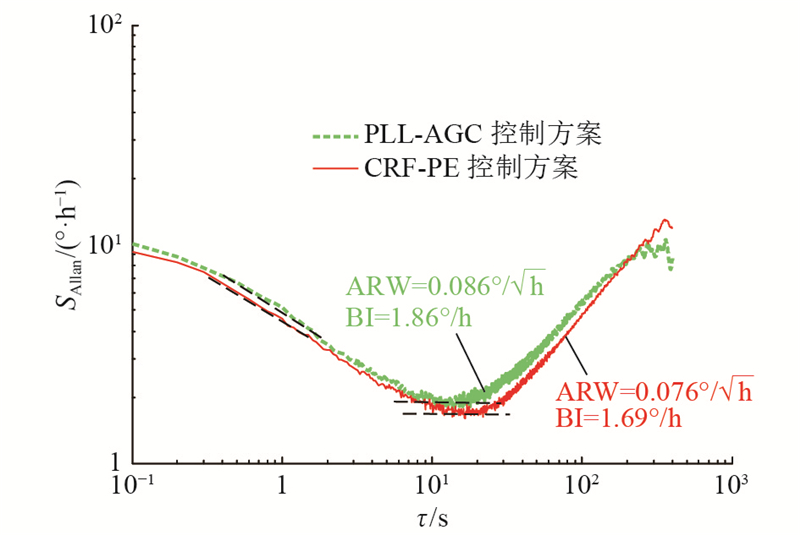
| 图 8 新型CRF-PE控制方案和传统PLL-AGC控制方案的陀螺零偏输出的Allan方差对比曲线 |
| Fig.8 Comparison of Allan variance graphs of gyroscope outputs using novel CRF-PE control scheme and conventional PLL-AGC control scheme |
|
|