基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
李智靖( ),叶锦华,吴海彬*()
),叶锦华,吴海彬*()
),叶锦华,吴海彬*()
Robot collision detection with convolution torque observer and friction compensation
Zhi-jing LI(),Jing-hua YE,Hai-bin WU*()
),Jing-hua YE,Hai-bin WU*()
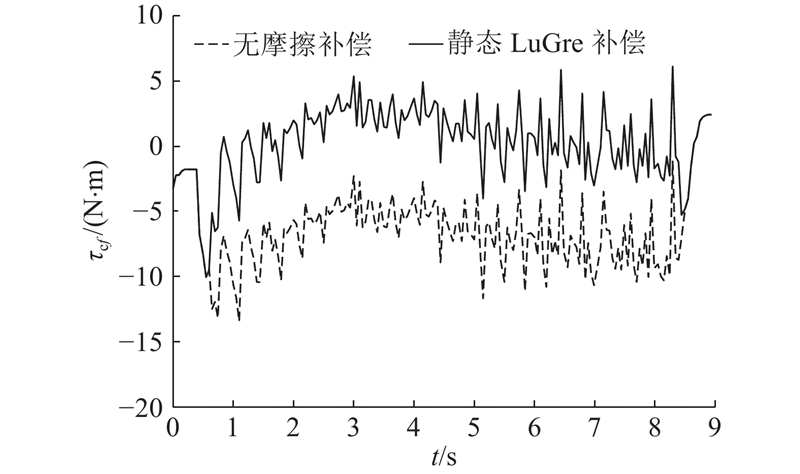
图 6. 无外力作用时关节2的观测结果
Fig.6. Observation results of joint 2 without external force