基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
李智靖( ),叶锦华,吴海彬*()
),叶锦华,吴海彬*()
),叶锦华,吴海彬*()
Robot collision detection with convolution torque observer and friction compensation
Zhi-jing LI(),Jing-hua YE,Hai-bin WU*()
),Jing-hua YE,Hai-bin WU*()
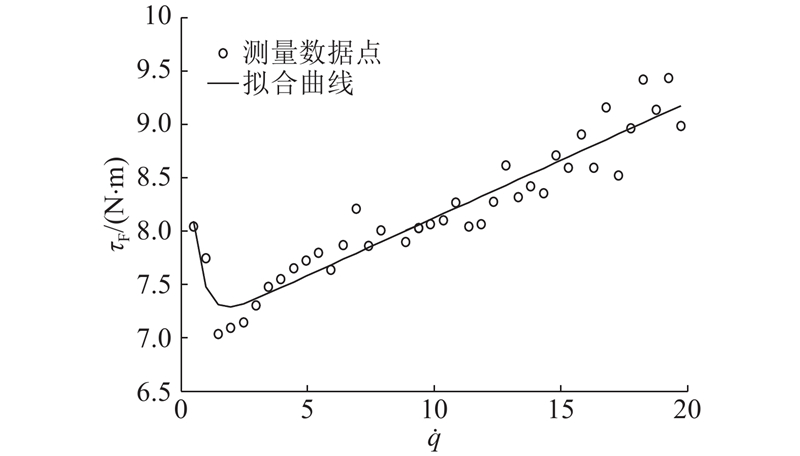
图 5. 静态LuGre模型拟合曲线
Fig.5. Fitting curve of static LuGre model